Howard R. Johnson

Science &
Mechanics (Spring 1980) Cover Illustration

Figure 1

Science & Mechanics: "Amazing Magnet-Powered Motor" (Spring 1980)
H. Johnson & W. Harrison, Jr:" The Permanent Magnet Motor"
USP # 4,151,431: Permanent Magnet Motor
USP # 4,877,983: Magnetic Force Generating Method & Apparatus
USP # 5,402,021: Magnetic Propulsion System
Tom Bearden/Karl Bergmann Comments
Blueprints
Lab Memorandum, CTEC, Inc (1996) ( MS Word.doc, 1 MB )
Howard R. Johnson
Science &
Mechanics (Spring 1980) Cover Illustration
Figure 1
Science & Mechanics (Spring 1980)"Amazing Magnet-Powered Motor"
by
Jorma Hyypia"We don't grant patents on perpetual motion machines," said the examiners at the U.S. Patent Office. "It won't work because it violates the law of Conservation of Energy," said one physicist after another. But because, inventor Howard Johnson is not the sort of man to be intimidated by such seemingly authoritative pronouncements, he now owns U.S. Patent No. 4,151,431 which describes how it is possible to generate motive power, as in a motor, using only the energy contained in the atoms of permanent magnets. That's right. Johnson has discovered how to build motors that run without an input of electricity or any other kind of external energy!
The monumental nature of the invention is obvious, especially in a world facing an alarming, escalating energy shortage. Yet inventor Johnson is not rushing to peddle his creation as the end-all solution to world- wide energy problems. He has more important work to do. First, there's the need to refine his laboratory prototypes into workable practical devices -in particular a 5,000-watt electric power generator already in the building. His second and perhaps more difficult major challenge: persuade a host of skeptics that his ideas are indeed practical.
Johnson, who has been coping with disbelievers for decades, can be very persuasive in a face-to-face encounter because he can not do more than merely theorize; he can demonstrate working models that unquestionably create motion using only permanent magnets. When this writer was urged by the editor of Science & Mechanics to make a thousand mile pilgrimage to Blacksburg, Virginia, to meet with the inventor, he went there as an "open-minded skeptic" and as a former research Scientist determined not to be fooled. Within two days, this former skeptic had become a believer. Here's why.
Doing the Unthinkable
Howard Johnson refuses to view the "laws" of science as somehow sacred, so doing the unthinkable and succeeding is second nature to him. If a particular law gets in the way, he sees no harm in going around it for a while to see if there's something on the other side. Johnson explains the persistent opposition he experiences from the established scientific community this way: "Physics is a measurement science and physicists are especially determined to protect the "Law" of Conservation of Energy. Thus the physicists become game wardens who tell us what laws' we can't violate. In this case they don't even know what the game is. But they are so scared that I and my associates are going to violate some of these laws, that they have to get to the pass to head us off!"
The critics say Johnson offers a "free lunch" solution to energy problems, and that there can be no such thing. Johnson demurs, reminding repeatedly that he has never suggested that his invention provides something for nothing. He also points gut that no one talks about a "free lunch" when discussing extraction of enormous amounts of atomic power by means of nuclear reactors and atom bombs. In his mind, it's much the same thing.
Johnson is the first to admit he doesn't actually know where the power be has tapped derives. But he postulates that the energy may be associated with spinning electrons, perhaps in the form of a "presently unnamed atomic particle." How do other physicists react to Johnson's suggestion that there may be an atomic particle so far overlooked by nuclear physicists? Says Johnson: "I guess it’s fair to say that most of them are revolted." On the other hand, a few converted scientists, including some who are associated with large and prestigious research laboratories, are intrigued enough to suggest that there should be a hunt for the answer, be it a "particle" or some other as yet unsuspected characteristic of atomic structure.
This article is prefaced with the foregoing brief summary of the ongoing controversy so that, in fairness to the inventor, we might all view his claims with open minds, even if it means temporary setting aside of cherished scientific concepts until more complete explanations are forthcoming. The main question to be answered here and now is this: Does Johnson permanent magnet motor work?
Before providing the answer, we need to face up to another question that undoubtedly nags in the minds of many readers: Is Johnson a bona fide researcher, or merely a "garage mechanic" mad inventor? As the following brief summary suggests, the inventor's credentials appear to be impeccable. Following seven years of college and university training, Johnson worked on atomic energy projects at Oak Ridge, did magnetics research for Burroughs company, and served as scientific consultant to Lukens Steel. He has participated in the development of medical electrical products, including injection devices. For the military he invented a ceramic muffler that makes a portable motor generator silent at 50 feet; this has been in production for the past 18 years. His contributions to the motor industry include: a hysteresis brake; non-locking brake materials for anti- skid application, new methods of curing brake linings; and a method of dissolving asbestos fibers. He has also worked on silencers for small motors, a super charger, and has perfected a 92-pole no-brush generator to go in the wheel of Lincoln automobiles as a skid control; that last item reduced the cost to one-eighth of the cost of an earlier design by utilizing metal-filled plastics for the armature and field. In all, Johnson is connected with more than 30 patents in the fields of chemistry and physics.
Figures 2, 3 & 4: Magnet Motor Models ~ Pictured here are three of the inventor's early models. Top left is a linear motor which propels a magnetic vehicle at high speeds through a series of rings. Top right is rotary motor upon which the prototype will be built. The 8-ounce manget, hand held to the large ring weighing 40 pounds, provides enough force to spin the entire assembly. In the third assembly above, the vehicle is propelled, in either direction, by the force of the large magnets arranged below tracks.
Sticky Tape Scientist
Despite his impressive credentials, this amiable and unpretentious inventor likes to characterize himself as a "Sticky tape" scientist. He sees no virtue in wasting time building fancy, elaborate equipment when more simple assemblies serve as well to test new ideas. The prototype devices shown in the photographs in this article were assembled with sticky tape and aluminum foil, the later material being used mainly to keep individual, permanent magnets packaged together so that they do not fly apart.
Perhaps the best way to describe what these three gadgets do is by reciting this writer's personal experiences during the interview demonstration. That way I will not merely be telling what the inventor says they do, but I will reveal what happened when I tried the experiments myself. When we start talking about how and why the things work as they do, well have to rely on the inventor’s explanations.
The first item consists of more than a dozen foil-wrapped magnets assembled to form a broad arc. Each magnet is extended upward slightly at each end to form a low U-shape, the better to concentrate magnetic fields where they are needed. The overall curvature of the mass of magnets apparently has no particular significance except to show that the distance between these stator magnets and the moving vehicle is not critical. A transparent plastic sheet atop this magnet assembly supports a length of plastic model railroad track. The vehicle, basically a model railroad flatcar, supports a foil-wrapped pair of curved magnets, plus some sort of weight, in some cases merely a rock. The weight is needed to keep the vehicle down on the track, against the powerful magnetic forces that would otherwise push it askew. That 'is all there is to the construction of this representation of a "linear motor."
I was prepared to develop eye strain in an effort to detect some sort of motion in the vehicle. I need not have been concerned. The moment the inventor let go of the vehicle be carefully placed at one end of the track, it accelerated and literally zipped from one end to the other and flew onto the floor! Wow!
I tried the experiment myself, and could feel the powerful magnetic forces at work as I placed the vehicle on the track. I gently eased the vehicle to the critical starting point, taking great care not to exert any kind of forward push, even inadvertently. I let go, Zip! It was on the floor again, at the other end of the track. Knowing that I would be asked if the track might have had a slant, I reversed the vehicle and started it from the opposite end of the track. It worked just as effectively in the reverse direction. In fact, the vehicle can even navigate a respectable upgrade. In light of these tests, and considering the remarkable speed of the vehicle, you can discount any notion that this was a simple "coasting" effect.
Incidentally, the photograph shows the vehicle about half ways along the track. It was "frozen" there by the electronic flash used to make the picture; there is no way of "posing" the vehicle in that position short of tying it down.
The second device has the U-shaped magnets standing on end in a rough circular arrangement oddly reminiscent of England's Stonehenge. This assembly is mounted on a transparent plastic sheet supported on a plywood panel pivoted, underneath, on a free turning wheel obtained from a skateboard. As instructed, I eased the 8-ounce focusing magnet into the ring of larger magnets, keeping it at least four inches away from the ring. The 40 pound magnet assembly immediately began to turn and accelerated to a very respectable rotating speed which it maintained for as long as the focusing magnet was held in the magnetic field. When the focusing magnet was reversed, the large assembly turned in the opposite direction.
Since this assembly is clearly a crude sort of motor, there's no doubt that it is indeed possible to construct a motor powered solely by permanent magnets.
The third assembly, which looks like the bones of some prehistoric sea creature, consists of a tunnel constructed of rubber magnet material that can be easily bent to form rings. This was one of the demonstration models Johnson took to the U.S. Patent Office during his appeal proceedings. Normally the patent examiners spend only a few minutes with each patent applicant, but played with Johnson’s devices for the better part of an hour. As the inventor was leaving, he overheard one sideline observer remark: "How would you like to follow that act?!"
It took Johnson about six years of legal hassling to finally obtain his patent, and he has been congratulated for his ultimate victory over patent office bureaucracy as well as for his inventiveness. One sign that he left the patent office more than a little shaken by the experience was the inclusion of diagrammatic material in the printed patent that does not belong there. So if you look up the patent, pay no attention to the "ferrite" graph on the first page; it belongs in some other patent!
The tunnel device of course worked very well in the inventor's office during my visit although Johnson observed that the rubber magnets are perhaps a thousand times weaker than the cobalt samarium magnets used the other assemblies. There's just one big problem with the more powerful magnets: they cost too much. According to the inventor, the magnets used to construct the Stonehenge rotating model are collectively worth more than one thousand dollars. But there's no need to depend solely on mass-production economies to bring the cost down to competitive levels. Johnson and U.S. Magnets and Alloy Co. are in the process of developing alternative, relatively low cost magnetic materials that perform very well.
How do they work?
The drawing that shows a curved "arcuate" armature magnet in three successive positions over a line of fixed stator magnets provides at least highly simplified insights into the theory of permanent magnet motive power generation. Johnson says curved magnets with sharp leading and trailing edges are important because they focus and concentrate the magnetic energy much more effectively than do blunt-end magnets. These arcuate magnets are made slightly longer than the lengths of two stator magnets plus the intervening space, in Johnson's setups about 3-1/8 inches long.
Note that the stator magnets all have their North faces upward, and that they are resting on a high magnetic permeability support plate that helps concentrate the force fields. The best gap between the end poles of the armature magnet and the stator magnets appears to be about 3/8 inch.
As the armature north pole passes over a magnet, it is repelled by the stator north pole; and there's an attraction when the north pole is passing over a space between the stator magnets. The exact opposite is of course true with respect to the armature South pole. It is attracted when passing over a stator magnet, repelled when passing over a space.
The various magnetic forces that come into play are extremely complex, but the drawing shows some of the fundamental relationships. Solid lines represent attraction forces, dashed lines represent repulsion forces, and double lines in each case indicate the more dominant forces.
As the top drawing indicates, the leading (N) pole of the armature is repelled by the north poles of the two adjacent magnets. But, at the indicated position of the armature magnet, these two repulsive forces .(which obviously work against each other), are not identical; the stronger of the two forces (double dashed line) overpowers the other force and tends to move the armature to the left. This left movement is enhanced by the attraction force between the armature north pole and the stator south pole at the bottom of the space between the stator magnets.
But that's not all! Let's see what is happening simultaneously at the other end (S) of the armature magnet. The length of this magnet (about 3-1/8 inches) is chosen, in relation to the pairs of stator in magnets plus the space between them, so that once again the attraction/repulsion forces work to move the armature magnet to the left. In this case the armature pole (S) is attracted by the north surfaces of the adjacent stator magnets but, because of the critical armature dimensioning, more strongly by the magnet (double solid line) that tends to "pull" the armature to the left. It overpowers the lesser "drag" effect of the stator magnet to the right. Here also there is the added advantage of, in this case, repulsion force between the south pole of the armature and the south pole in the space between the stator magnets.
The importance of correct dimensioning of the armature magnet cannot be over-emphasized. If it is either too long or too short, it could achieve an undesirable equilibrium condition that would stall movement. The objective is to optimize all force conditions to develop the greatest possible off-balance condition, but always' in the same direction as the armature magnet moves along the row of stator magnets. However, if the armature is rotated 180 degrees and started at the opposite end of the track, it would behave in exactly the same manner except that it would, in this example, move from left to right. Also note that once the armature is in motion, it has momentum that helps carry it into the sphere of influence of the next pair of magnets where it gets another push and pull, and additional momentum.
Complex Forces
Some very complex magnetic forces are obviously at play in this deceptively simple magnetic system, and at this time it is impossible to develop a mathematical model of what actually occurs. However, computer analysis of the system, conducted by Professor William Harrison and his associates at Virginia Polytechnic Institute (Blacksburg, VA), provide vital feedback information that greatly helps in the effort to optimize these complex forces to achieve the most efficient possible operating design.
As Professor Harrison points out, in addition to the obvious interaction between the two poles of the armature magnet and the stator magnets, many other interactions are in play. The stator magnets affect each other and the support plate. Magnet distances and their strengths vary despite best efforts of manufacturers to exercise quality controls. In the assembly of the working model, there are inevitable differences between horizontal and vertical air spaces. All these interrelated factors must be optimized, which is why computer analysis in this refinement stage is vital. It's a kind of information feedback system. As changes are made in the physical design, fast dynamic measurements are made to see whether the expected results have actually been achieved. The 'new computer data is then used to develop new changes in the design of the experimental model. And so on, and on.
That very different magnetic conditions exist at the two ends of the armature is shown by the actual experimental data displayed in the table and associated graph. To obtain this information, the researchers first passed the probe of an instrument used to measure magnetic field strengths over the stator magnets and the intervening spaces. We shall call this the "Zero" level although there is a very tiny gap between the probe and the tops of the stator magnets. These measurements in effect indicate what each pole of the armature magnet "sees" below as it passes over. the stator magnets.
Next the probe is moved to a position just beneath one of the armature poles, at the top of the 3/8-inch armature-to-stator air gap. Another set of magnetic flux measurements is made. The procedure is repeated with the probe positioned just beneath the other armature pole.
Now "Instinct" might suggest, and correctly so, that the flux measurements at the top and bottom of the air gap will differ. But if "instinct" also suggests that these differences are pretty much the same at the two armature pole positions, you would be very much in error!
First study the two tables that show actual flux density measurements. Note that in this particular experiment the total magnetic flux amounted to 30,700 Gauss (the unit of magnetic strength) when the probe was held at the "Zero" level under the north pole of the magnet, and a total of 28,700 Gauss when the probe was moved to the top of the 3/8-inch air gap. The difference between these total 'measurements is 2,000 Gauss.
Similar readings made at the air gap between the south pole of the armature and the stator magnets indicates a total flux at "Zero" level of 33,725 Gauss, and 24,700 Gauss at the top of the air gap. This time the difference is a much larger 9,025 Gauss, or four and one half times greater than for the north pole! Clearly, the magnetic force conditions are far from identical at the two ends of the armature magnet.
The middle five pairs of figures from each table hive been plotted in graphic form to make these differences more obvious. In the top "South Pole" graph the dashed line connects, the "Zero" level readings made over the stator magnets and over the intervening air spaces. Points along the solid line indicate comparable readings made with the probe just beneath the armature south pole. It is easy to see that there is an average 43% reduction of the attraction between the armature and stator magnets created by the air gap. Equally true, but perhaps not so obvious, is the fact that there is an average 36% increase of repulsion when the south pole of the armature passes over the spaces between the stator magnets. The percentage increase only seems smaller because it applies to a much smaller "Zero" level value.
The second graph shows that the changes are much less dramatic at the north pole of the armature. In this case there's an average 11.7% decrease of attraction over the spaces, and a 2.4% increase, of repulsion when the armature north pole passes over the stator magnets.
As you study the data, be sure to note that the columns are labeled differently. In the case of the north pole data, the stator magnet areas repulse the armature north pole while the spaces between the stator magnets attract. The conditions are exactly the opposite for the south pole of the armature magnet. When the south pole passes over a magnet, there is strong attraction; when it passes over a space, there is repulsion.
The Ultimate Motor
A motor based on Johnson's findings would be of extremely simple design compared to conventional motors. As shown in the diagrams developed from Johnson’s patent literature, the stator/base unit would contain a ring of spaced magnets backed by a high magnetic permeability sleeve. Three arcuate armature magnets would be mounted in the armature which has a belt groove for power transmission. The armature is supported on ball bearings on a shaft that either screws or slides into the stator unit. Speed control and start/stop action would be achieved by the simple means of moving the armature toward and away from the stator section.
There is a noticeable pulsing action in the simple prototype units that may be undesirable in a practical motor. The movement can be smoothed, the inventor believes, by simply using two or more staggered armature magnets as shown in another drawing.
What’s Ahead?
For inventor Howard Johnson and his permanent magnet power source there's bound to be plenty of controversy, certainly, but also progress. A 5000 watt electric generator powered by a permanent magnet motor is already on the way, and Johnson has firm licensing agreements with at least four companies at this writing.
Will we see permanent magnet motors in automobiles in the near future? Johnson wants nothing to do with Detroit at this time because, as he puts it: "It';s too emotional - we'd get smashed into the earth!" The inventor is equally reluctant to make predictions about other applications as well, mainly because he just wants time to perfect his ideas and, hopefully, get the scientific establishment to at least consider his unorthodox ideas with a more open mind.
For example, Johnson argues that the magnetic forces in a permanent magnet represent superconductance that is akin to phenomena normally associated only with extremely cold superconducting systems. He argues that a magnet is a room temperature superconducting system because the electron flow does not cease, and because this electron flow can be made to do work. And for those who pooh- pooh the idea that permanent magnets do work, Johnson has an answer: "You come along with a magnet and pick up a piece of iron, then some physicist says you didn't do any work because you used that magnet. But you moved a mass through a distance. Right? That's work that requires energy. Or you can hold one magnet in the air indefinitely by positioning it over another magnet with like poles facing. The physicist will argue that because it involves magnetic repulsion, no work is done. Yet if you support the same object with air, they will agree in a minute that work is done!"
There's no doubt in Johnson's mind that he has succeeded in extracting usable energy from the atoms of permanent magnets. But does that imply that the electron spins and associated phenomena that he thinks provide this power will eventually be used up? Johnson makes no pretense of knowing the answer: I didn't start the electron spins, and I don't know any way to stop them - do you? They may eventually stop, but that is not my problem."
Johnson still has many practical problems to solve to perfect his invention. But his greater challenge may be to win general acceptance of his ideas by an obviously nervous scientific community in which many physicists remain compulsive about defending the law of Conservation of Energy without ever wondering whether that "law" really needs defending.
The dilemma facing Johnson is not really his dilemma but rather that of other scientists who have observed his prototypes. The devices obviously do work. But the textbooks say it shouldn't work. And all that Johnson is really saying to the scientific community is this: here is a phenomenon which seems to contradict some of our traditional beliefs. For all our sakes let's not dismiss it outright but take the time to understand the complex forces at work here.
by
Howard R. Johnson & William P. Harrison, Jr.( Engineering Fundamentals Division, Virginia Polytechnic Institute and State University, Blacksburg, VA )
Presented at the UNITAR ( UN Institute for Training & Research ) Conference on Long-Term Energy Resource, Montreal, Canada, November 26-December 7, 1979.
I. Introductory remarks (by Mr. Johnson)
Today when energy is so expensive, it is not hard to drum up interst for most any avenue that offers a breath of hope or a way of escape, but this was not necessarily so in 1942. We were somewhat satisfied and convinced that we had the main sources of energy in view. So it took a pure act of faith to try to develop a new un-named source.
It took faith to spend time on it. It took faith to spend money on it. And it took faith to consider facing the opposition later when I made my work known and faced all the status quo people.
So, in 1942 using the Bohr model of the atom, and knowing that unpaired electron spins created a permanent magnet dipole, I kept wondering why we couldn't use these fields to drive something. I was sure that the magnetic effect of the spins was similar enough to the field of a current in a wire to do the same thing. I had no knowledge of electron spins stopping and knew no method that I could exert to stop them, so I decided to try to work out a method to use them.
At the same time there were no good hard magnetic materials that I knew of, materials that could be opposed with strong magnetic fields and not be demagnetized enough to damage them. Not only that, they would not give the thrust that I desired.
Having a chemical background, I thought it would be nice to use the best magnetic materials I could find in combination with an interstitial material that was highly diamagnetic to force the electron spin to stay in place.
The U.S. Navy later made such a compound using bismuth and good magnetic materials, but the internal coercive forces were so great that this strong magnet would fall apart if not encased in glass. It was also expensive.
So I kept checking magnetic materials while I worked on designs that I thought should be implemented. It was a quiet, sometimes lonely job over the years, for I didn't share my plans with my associates. My self-imposed security would not permit it, and I knew of few people who would be interested anyway.
In the fifties, as ceramic magnets became better and harder, and long-field metal magnets appeared on the scene, I began to freeze some designs and to have magnets custom made to fit them.
It was about this time that I mentioned the fact that just as I believed electron spins made permanent magnets, I also believed that they were responsible for the 60° angles in the structure of snowflakes giving the six-spoked wheel, the six-sided spokes, etc. The dean of the school where I was teaching said, "Maybe so" and ask me if I knew that snowflakes were mentioned in the Bible as being important. I told him, "No, I didn't know that," but I looked it up. It said: "Hast thou entered into the treasures of the snow? Or hast thou seen the treasures of the hail? Which I have reserved against the time of trouble, against the day of battle and war."
My comment was, "Well, maybe this is more important than I thought." So I went ahead and worked on it another ten years.
I went to the Library of Congress and looked up snowflakes. I found a wonderful book there by Dr. Bentley of New Hampshire. He has spend many years making these studies, and he had learned a lot, as well as turning out one of the world's most beautiful books. He had found that snowflakes have gas pockets oriented on 60° angles and that the gas has a higher percentage of oxygen than air. That's one reason why snow water rusts so well. This higher concentration of oxygen also interested me because oxygen is more attracted to a magnetic field than other gases.
Finally, using the best ceramic magnets I could find and the best metal magnets, I worked out a scheme for a linear motor. The stator would be laid out as if it were unwound from around a motor. The parts of the armature would ride just above the stator and have the same beveled angular orientations I have just mentioned.
Dies were made for the curved armature magnets, and an order was placed for these shapes, despite the objections of magnet manufacturers who said it was a bad design. They didn't know what it was for, but they were sure it was a bad design. They wanted to make horseshoe magnets. They even begged me to content myself with half an order. I did not agree --- and once again you have that little matter of faith; faith to try to implement a new theory; faith to spend your own limited funds when you have a a family and other financial responsibilities staring you in the face; faith to buck the recognized authorities and manufacturers in the field; faith to believe that your work is good and that some day, despite all the hazards, you will apply for and receive patent rights in your own country and perhaps throughout the rest of the world; and finally, faith that you can resist being smashed into dust by industrial giants and/or being robbed by others who know only how to steal.
Believe it or not, my first motor assembly showed about two pounds of thrust. The little toy car on which I fastened the armature magnets for support ran in both directions over the stator, showing that the focusing and timing of the interactions was not too bad.
This was the first light at the end of a rather dark tunnel I had been traveling for many years. I breathed a real sign of relief as my young son played with this "new toy," and was able to operate it as easily as I could.
After much testing of linear and circular designs, and looking for an attorney for years suited to securing a patent on the new theoretical work, I was led to Dunkan Beaman of Beaman & Beamon in Jackson, Michigan. It took some time to prepare the patent. The attorney built some models himself to check certain parameters. Finally, we entered the case in the patent office expecting a lot of opposition. We were correct. We got it. But again, faith saved the day as we battled for many years to gain a rather complete victory.
Now the work requires different kinds of faith: faith in those who have taken cut licenses and who will license; faith to continue the research to replace scarce materials in the magnets; and faith that this work will continue to progress and that it will eventually fulfill its goal.
For a number of reasons, the permanent magnet motor has not received much consideration. In fact, nothing too radical has been done since Faraday took some very crude materials and showed the world that it was possible to make a motor. This work of his largely influenced the thinking of Clerk Maxwell and others who followed.
Today, the two greatest obstacles to using a permanent magnet motor are, first, the belief that it violates the conservation of energy law; and, secondly, that the magnetic fields of attraction and repulsion decrease according to the inverse square law then the air gap is increased.
In fact, both contentions are quite wrong because they are based on wrong considerations.
The permanent magnet is a long time energy source. This has been shown for many years in the rating of magnets as high or low energy sources for many applications over long usage.
A loudspeaker composed entirely of electromagnets would be unreal in size and energy consumption. Yet, despite examples of this type, many hesitate to apply the same principles to motors and extend them even further by using permanent magnets for both the stator and armature.
The elements of all electric and permanent magnet motors are similar. A field imbalance must be created, the fields must be focused and timed, and magnetic leakage must be controlled.
In the wound motor, brushes and contact rings give the timing, the size and shape of the wound fields and poles gives the focusing, and the motor case and kind of iron used help to limit the leakage.
In our permanent magnet motors the timing is built into the motors by the size, shape, and spacing of the magnets in the stator and armature. The focusing is controlled by the shape of the magnets, pole length, and the width of the air gap. This air gap, through which magnets oppose and attract each other, is a rare phenomenon. Usually when a magnetic air gap is increased, the field decreases inversely as the square.
When the air gap of the permanent magnet motor is increased, a curious but definite change takes place. There is a large decrease in the reading at south pole of the armature and an increase in the reading at the north pole. Thus, a Hall-effect sensing probe will give a higher gauss reading at the north pole and a decreasing count at the south pole. This helps explain why the thrust is better with a larger air gap than a smaller one. The attracting field is minimized and will not produce a locking force, while the repulsion of the crescent magnet is great enough to generate a thrust vector component that will drive the armature.
As I tried to explain in the patent, I believe that the permanent magnet is the first room temperature super conductor. In fact, I believe that super conductors are simply large wound magnets. The current in a super conductor is not initiated by a strong emf, such as a battery, but is instead actually induced into existence by a magnetic field. Then, in order to determine how much current may be flowing in the super conductor coil, we measure its magnetic field. This appears to be something like going out the door and coming back in the window.
Another rather unique feature of super conductors is the fact that their magnetic lines of force experience a change in direction. No longer do these lines flow at right angles to the conductor, but they now exist parallel to the conductor. Theoretically, the heavy conductor currents exist in the fine filaments of niobium within each small wire of niobium tin from which such super conductors are made. Isn't it interesting that the finer the wire the less the resistance until eventually there is no resistance at all?
II. Theoretical Analysis (presented by William P. Harrison, Jr.)
1. Introduction
Despite the fact that the linear version of the permanent magnet motor (Johnson, 1979) may appear conceptually simple (see Fig. 1), the complex interactions of the fields alone place it in a class with other quite sophisticated motive systems.
Figure 1: Partial Front and Plan Views of a Linear Model of the Howard Johnson Permanent Magnet Motor
Many parameters play an important part in making possible the successful design of a permanent magnet motor. A number of these variables relate directly to the geometry of the system and its components. Mathematical models for both the linear and circular versions of Mr. Johnson's motors are presently under development, and include such controllable parameters as stator-to-armature air gap, stator element air gap spacing, armature pole length, stator magnet dimensions, magnet material variations, magnetic permeability and geometry of backing metals, and multiple armature couplings, to mention only a few. However, much of the early work involved quit simple mathematical investigations, and even at this level some remarkable revelations resulted. Also, as often is true with simple models, considerable insight into the mechanisms that might prove predominant was gained. Therefore, it is our intention to share with you some of those early analytical investigations and findings.
Even though Coulomb's Law, embodying the inverse square relationship as it does, may yet prove suspect, it nevertheless provides an exceedingly simple yet viable form upon which to base an elementary model of the linear version of the permanent magnet motor. Describing the interaction between two magnetic monopoles, Coulomb's Law in vector form is recalled as
(1)

where M and M' are the pole strengths (positive if north, negative if south), u [mu] is the permeability of the medium in which the poles are located, r is the straight-line separation distance between the two poles, and f [ f with line over top] is the vector of force (see Fig. 2) acting at each pole (positive in magnitude for repulsion and negative for attraction).
Figure 2: Coulomb's Law
The vector nature of Eq. (1), the fact that f's line of action is colinear with the straight-line distance r between poles, its superposition properties when applied to multiple poles, and its restriction to static systems fixes in space are all well known conditions on Eq. (1). We will use the superposition property of Eq. (1) to extend its application to a spatial domain containing many more poles than the two shown in Fig. 2. However, Eq. (1) will first be resolved into scalar components so that analytical expressions can be more easily developed.
Our analysis will be two-dimensional and coplanar, restricted to the vertical x-y plane. It should be noted that the horizontal stator "track" of H.R. Johnson's linear model comprises a plurality of flat magnets, rectangular in cross section, each having an aspect ratio (length-to-thickness ratio) of 16. This high value contributes to the two-dimensional nature of the model and helps to minimize and effects in the z direction. Thus there is some justification for a two-dimensional analysis, at least in the case of the linear model we are considering here.
Figure 3: Positional Locations of Two Opposing North monopoles in X-Y Space ~
As shown in Fig. 3, we consider first a north pole of strength M located at coordinates (E [epsilon], n [nu]) with a second north pole of strength M', located on the x-axis at (x,0). Force f, acting on the monopole at (E,n), when resolved into its horizontal and vertical components yields, respectively,
(2)

and
(3)

2. The Attractive Sheet
Figure 4: Spatial Orientation of Thin, Magnetized Sheet having high aspect ratio and with S side face up
To illustrate some of the assumptions and extensions of Coulomb’s Law that will be made, the simple example of a magnetic sheet lying along the x-axis will be considered first (see Fig. 4). The sheet, of finite length L, is a permanent magnet magnetized across its y-direction thickness and having a high aspect ratio (to eliminate z-direction edge effects). The south-pole face will be oriented up, with north facing downward on the underside of the sheet. Underside effects will be ignored as though the sheet represented a continuous distribution of only south monopoles along the x-axis. To incorporate such distributions into Eq. (1) we replace M’ with the differential dM’ and introduce the function B(x) so that
(4) dM’ = B(x) dx
Then the magnitude of the total force vector, F, acting on an isolated north monopole of strength M situated somewhere within the upper half of the x-y plane, becomes
(5)

where x is the ratio x/L. Assuming that the magnetic density along the sheet can be represented by the southern constant -B, and neglecting end effects at x = 0 and x = L, Eq (5) reduces to
(6)

where
(7)

the strength parameter M’ having been determined by integrating Eq (4) over the sheet length L, and p is the ratio r/L.
Figure 5: North Monopole Positioned Symmetrically above the center of a magnetized, attracting sheet
Figure 6: Force Imbalance Acting on a North Monopole above a mangetized sheet tending to restore the pole to sheet center
If the north monopole is placed directly above the center of the sheet, at coordinates (E, n), with E = L/2 and the vertical air-gap separation distance n taken as arbitrary, the symmetrical distribution of incremental force vectors acting at (E,n) will appear as shown in Fig. 5. Note that a shift of the north monopole to the left results in a force imbalance which tends to pull the pole back to the right, as shown in Fig. 6. So considering now only the x-component of F, similar to Eq (2) we write
(8)

where X and Y are the dimensionless ratios
(9)

and
(10)

For any fixed position (X,Y) of the north monopole in the upper half plane, Eq (8) can be integrated to give
(11)

Figure 7: X-Direction Distribution of the X-Component of attractive force exerted on a north monopole by a thin, magnetized sheet
This ratio is shown in Fig (7) as a continuous function of X locations with Y treated parametrically. The Y = 1 curve represents the field influence on the north monopole situated at a constant air-gap separation (n = L) quite some vertical distance above the sheet; whereas at Y = 0.1 the monopole is located much closer to the x axis. Reversal of the force component through its zero value at mid-sheet (X = ½) is clearly shown.
In order to trace some trajectories through this field, we now observe that the y-component of force F will be
(12)

This function is shown in Fig (8) with a Y value of 0.20
Figure 8: [Missing]
In dimensionless form the equations of motion for trajectory paths of the monopole above the sheet in planar X-Y space become
(13)

and
(14)

where
(15)

(16)

and
(17)

In these expression t is real time and T is simply a time constant chosen arbitrarily. As previously noted, L is the length of the sheet; whereas, g is the gravitational acceleration constant and W is the downward weight force of the moving monopole above the sheet. For magnetic force terms (rx)mag and (ry)mag we substitute directly Eq (11) and Eq (12), respectively.
Several of the trajectories resulting from the integration of Eq (13) and Eq (14) are shown in Fig.9. They all exhibit the expected behavior. As already implied in the discussion of Fig. 7, the function (rx)mag given by Eq (11) has a stable point of equilibrium at X = ½ and therefore drives the free-falling monopole towards the sheet center, regardless of the initial drop-point location. The function (ry)mag from Eq (12) is equally persuasive in pulling the monopole down towards the sheet itself, and manifests that attraction quite pervasively throughout the integration of Eq (14), even when the G term may be omitted (as it was in the trajectories of Fig. 9). Actually, the computer integration procedure will not carry the monopole all the way to surface contact with the sheet at Y = 0 because of the infinite condition which exists there as reflected by Eq (12). Thus, tailings of these trajectories (Fig 9) have been completed by manually overriding the plotter.
Figure 9: Trajectories of a North Monopole in an attractive field generated by the thin, magnetized sheet lying in the X-interval 0-1
As we would anticipate in working with this type of central field, where B in Eq (4) is a simple constant, the field is conservative with curl of F vanishing. Also, the reverse symmetry of (rx)mag about X = ½, as seen in Fig. 7, confirms that the energy integral for this function will vanish without any appropriate limit pairs of X.
3. The Repulsive Sheet
By substituting +B instead of -B for B in Eq (4), the sheet of length L lying along the x-axis becomes repulsive, with its northern face directed upward, opposing the north monopole above it at location (E,n). Of course the sign in Eq (6) becomes positive and the functions (rx)mag and (ry)mag reverse their behavior accordingly, as illustrated in Fig. 10. Again (rx)mag will have an equilibrium point at X = ½, but now it is destabilizing. As a consequence, resulting trajectories for the north monopole are much more interesting in this case than they were with the attractive sheet. Several paths are shown in Fig 11 with different values used for the W/
Jtrajectory in Eq (17). Parameter G was included, and in each example the trajectories commenced at (0.9, 0.2) with zero initial velocity.The attractive and repulsive sheet results are easily demonstrated since rubberized flexible sheet magnets are commercially available, such as those sold by the Permag Corp. of Jamaica, NY. It may also be interesting to note that with slight modifications this first simple analytical sheet model can be used to gain some insight into operation of the so-called "magnetic Wankel" reported on by Scott (1979). Figure 10: X-Direction Distributions of (rx)mag and (ry)mag for the repulsive field of a thin, magnetized sheet acting on a moving north monopole
Figure 11: Trajectories of a North Monopole in a repulsive field generated by a thin, magnetized sheet lying in the X-interval 0-1
Figure 12: Pole Strength Influence Factor, M', as a cosine function of linear displacement distance, x
Figure 13: Experimentally Detemined Magnetic Flux Density, B, along a linear model of the Johnson permanent magnet motor
4. The Sinusoidal Model
The first paper (Harrison, 1979) relating, indirectly, to any mathematical analysis of the permanent magnet motor adopted a cosine function (Fig 12) to simulate the distribution of influence parameter M’ generated by the flat stator track of Mr Johnson’s linear model. An experimentally determined distribution, shown in Fig 13, was obtained by moving a Hall-effect probe over the stator track of one of Mr Johnson’s early linear models having seven flat ceramic magnet elements. The figure shown was produced by a plotter connected directly to the monitor computer controlling positioning of the Hall probe and processing its output signal. Ordinate values on the graph are magnetic flux density in gauss measured relative to a predetermined background value. These direct-reading experimental results suggest that the function
(18)

substituted into Eq (4) should prove interesting to pursue as a more challenging test of what might be gleaned from this simple Coulomb model we have been discussing. It should be noted that one of the important differences between the function (18) and that shown in Fig 12 is that in Eq (18) the period length parameter xp is double that shown in Figure 12.
Using Eq (18), the total force magnitude expression Eq (5) becomes
(19)

where a total track length distance of L has been used to form the dimensionless ratios
p = r/L, x = x/L, and xp = xp/L. Also, if Eq (7) is used forJin Eq (19), then in that expression one must substitute the product BL for M’.Now we plan to hold Y constant while investigating linear motion of the monopole along this track in the X-direction only. So we need consider only the X-component of F from Eq (19) which yields
(20)

Figure 14: Oscillatory Path of a North Monopole restrained to x-direction motion over a three-element linear stator assembly
With this expression substituted into Eq (13), integration becomes straightforward and yields the typical oscillatory type of trajectory path shown in Fig 14. As Mr Johnson has brought out, the focusing armature magnet of his linear model will start at either end of the stator track simply by insuring that the north end of this bipoled crescent is leading the south (see Fig. 1). So, in Fig. 14, we are showing the X-direction motion from right to left instead of from left to right as in our previous examples. Also, by simply rotating the figure clockwise through 90 degrees, it becomes easy to follow the behavior of dimensionless velocity, Vx, in Fig 11, since Vx is defined as
(21)

It will be noted in Fig 14 that the north monopole has been allowed to self-start its motion at the origin with Vx initially zero.
We now discuss out final adjustment which proved to be an exciting revelation at the time it was first investigated several months ago. Johnson (1979, col. 5, line 39) states that the horizontal air-gap spacing between the magnet elements which the stator track comprises should vary slightly from normal in order to smooth out movement of the armature. Introducing this type of variation into a two-dimensional model, provided the charge is nonuniform, would certainly transform the field from conservative to nonconservative. It should by now be apparent that only a nonconservative model has any chance at all of even partially explaining the phenomena of the permanent magnet motor.
With these thoughts in mind, an attempt was made to drive the armature monopole of Fig 14 on to the second stator magnet and beyond by varying the horizontal gap parameter xp during the integration process (i.e., during the motion). The results are shown in Fig 15. It was found that through small variations in xp in Eq (20), as the monopole advanced along its trajectory path from one X position to another, sufficient control over the moving pole could be exercised to carry it over the full length of the stator and beyond.
Figure 15: Continuus Path of a North Monopole restrained to x-direction motion shown traversing a linear stator assembly comprised of seven permanent magnet elements
III. References
Harrison, William P., Jr.: "A Solution for the Optimal Gap of a Monopole Element Moving in a Sinusoidally Distributed Magnetic Field", paper presented to the Engineering Section, Virginia Academy of Science, 57th Annual Meeting, Richmond VA, May 8-11, 1979.
Johnson, Howard R: US Patent # 4,151,431 (April 24, 1979), "Permanent Magnet Motor".
Scott, David, "Magnetic Wankel for Electric Cars", Popular Science, p. 80, June 1979.
Permanent Magnet Motor
Howard R. Johnson
Abstract --- The invention is directed to the method of utilizing the unpaired electron spins in ferro magnetic and other materials as a source of magnetic fields for producing power without any electron flow as occurs in normal conductors, and to permanent magnet motors for utilizing this method to produce a power source. In the practice of the invention the unpaired electron spins occurring within permanent magnets are utilized to produce a motive power source solely through the superconducting characteristics of a permanent magnet and the magnetic flux created by the magnets are controlled and concentrated to orient the magnetic forces generated in such a manner to do useful continuous work, such as the displacement of a rotor with respect to a stator. The timing and orientation of magnetic forces at the rotor and stator components produced by permanent magnets to produce a motor is accomplished with the proper geometrical relationship of these components.
Description
FIELD OF THE INVENTION
The invention pertains to the field of permanent magnet motor devices solely using the magnetic fields created thereby to product motive power.
BACKGROUND OF THE INVENTION
Conventional electric motors employ magnetic forces to produce either rotative or linear motion. Electric motors operate on the principle that when a conductor is located in a magnetic field which carries current a magnetic force is exerted upon it.
Normally, in a conventional electric motor, the rotor, or stator, or both, are so wired that magnetic fields created by electromagnetics may employ attraction, repulsion, or both types of magnetic forces, to impose a force upon the armature to cause rotation, or to cause the armature to be displaced in a linear path. Conventional electric motors may employ permanent magnets either in the armature or stator components, but in the art heretofore known the use of permanent magnets in either the stator or armature require the creation of an electromagnetic field to act upon the field produced by the permanent magnets, and switching means are employed to control the energization of the electromagnets and the orientation of the magnetic fields, to produce the motive power.
It is my belief that the full potential of magnetic forces existing in permanent magnets has not been recognized or utilized because of incomplete information and theory with respect to the atomic motion occurring within a permanent magnet. It is my belief that a presently unnamed atomic particle is associated with the electron movement of a superconducting electromagnet and the lossless current flow of Amperian currents in permanent magnets. The unpaired electron flow is similar in both situations. This small particle is believed to be opposite in charge and to be located at right angles to the moving electron, and the particle would be very small as to penetrate all known elements, in their various states as well as their known compounds, unless they have unpaired electrons which capture these particles as they endeavor to pass therethrough.
Ferro electrons differ from those of most elements in that they are unpaired, and being unpaired they spin around the nucleus in such a way that they respond to magnetic fields as well as creating one themselves. If they were paired, their magnetic fields would cancel out. However, being unpaired they create a measurable magnetic field if their spins have been oriented in one direction. The spins are at right angles to their magnetic fields.
In niobium superconductors at a critical state, the magnetic lines of force cease to be at right angles. This change must be due to establishing the required conditions for unpaired electronic spins instead of electron flow in the conductor, and the fact that very powerful electromagnets that can be formed with superconductors illustrates the tremendous advantage of producing the magnetic field by unpaired electron spins rather than conventional electron flow.
In a superconducting metal, wherein the electrical resistance becomes greater in the metal than the proton resistance, the flow turns to electron spins and the positive particles flow parallel in the metal in the manner occurring in a permanent magnet where a powerful flow of magnetic positive particles or magnetic flux causes the unpaired electrons to spin at right angles. Under cryogenic superconduction conditions the freezing of the crystals in place makes it possible for the spins to continue, and in a permanent magnet the grain orientation of the magnetized material results in the spins permitting them to continue and for the flux to flow parallel to the metal.
In a superconductor, at first the electron is flowing and the positive particle is spinning; later, when critical, the reverse occurs, i.e., the electron is spinning and the positive particle is flowing at right angles. These positive particles will thread or work their way through the electron spins present in the metal.
In a sense, a permanent magnet may be considered the only room temperature superconductor. It is a superconductor because the electron flow does not cease, and this electron flow can be made to do work because of the magnetic field it supplies. Previously, this source of power has not been used because it was not possible to modify the electron flow to accomplish the switching functions of the magnetic field. Such switching functions are common in a conventional electric motor where electrical current is employed to align the much greater electron current in the iron pole pieces and concentrate the magnetic field at the proper places to give the thrust necessary to move the motor armature. In a conventional electric motor, switching is accomplished by the use of brushes, commutators, alternating current, or other known means.
In order to accomplish the switching function in a permanent magnet motor, it is necessary to shield the magnetic leakage so that it will not appear as too great a loss factor at the wrong places. The best method to accomplish this is to use the superconductor of magnetic flux and concentrate it to the place where it will be the most effective. Timing and switching can be achieved in a permanent magnet motor by concentrating the flux and using the proper geometry of the motor rotor and stator to make most effective use of the magnetic fields generated by the electron spins. By the proper combination of materials, geometry and magnetic concentration, it is possible to achieve a mechanical advantage of high ratio, greater than 100 to 1, capable of producing a continuous motive force.
To my knowledge, previous work done with permanent magnets, and motive devices utilizing permanent magnets, have not achieved the result desired in the practice of the inventive concept, and it is with the proper combination of materials, geometry and magnetic concentration that the presence of the magnetic spins within a permanent magnet may be utilized as a motive force.
SUMMARY OF THE INVENTION
It is an object of the invention to utilize the magnetic spinning phenomenon of unpaired electrons occurring in ferro magnetic material to produce the movement of a mass in a unidirectional manner as to permit a motor to be driven solely by magnetic forces as occurring within permanent magnets. In the practice of the inventive concepts, motors of either linear or rotative types may be produced.
It is an object of the invention to provide the proper combination of materials, geometry and magnetic concentration to utilize the force generated by unpaired electron spins existing in permanent magnets to power a motor. Whether the motor constitutes a linear embodiment, or a rotary embodiment, in each instance the "stator" may consist of a plurality of permanent magnets fixed relative to each other in space relationship to define a track, linear in form in the linear embodiment, and circular in form in the rotary embodiment. An armature magnet is located in spaced relationship to such track defined by the stator magnets wherein an air gap exists therebetween. The length of the armature magnet is defined by poles of opposite polarity, and the length of the armature magnet is disposed relative to the track defined by the stator magnets in the direction of the path of movement of the armature magnet as displaced by the magnetic forces.
The stator magnets are so mounted that poles of like polarity are disposed toward the armature magnet and as the armature magnet has poles which are both attracted to and repelled by the adjacent pole of the stator magnets, both attraction and repulsion forces act upon the armature magnet to produce the relative displacement between the armature and stator magnets.
The continuing motive force producing displacement between the armature and stator magnets results from the relationship of the length of the armature magnet in the direction of its path of movement as related to the dimension of the stator magnets, and the spacing therebetween, in the direction of the path of armature magnet movement. This ratio of magnet and magnet spacings, and with an acceptable air gap spacing between the stator and armature magnets, will produce a resultant force upon the armature magnet which displaces the armature magnet across the stator magnet along its path of movement.
In the practice of the invention movement of the armature magnet relative to the stator magnets results from a combination of attraction and repulsion forces existing between the stator and armature magnets. By concentrating the magnetic fields of the stator and armature magnets the motive force imposed upon the armature magnet is intensified, and in the disclosed embodiments such magnetic field concentration means are disclosed.
The disclosed magnetic field concentrating means comprise a plate of high magnetic field permeability disposed adjacent one side of the stator magnets in substantial engagement therewith. This high permeability material is thus disposed adjacent poles of like polarity of the stator magnets. The magnetic field of the armature magnet may be concentrated and directionally oriented by bowing the armature magnet, and the magnetic field may further be concentrated by shaping the pole ends of the armature magnet to concentrate the magnet field at a relatively limited surface at the armature magnet pole ends.
Preferably, a plurality of armature magnets are used which are staggered with respect to each other in the direction of armature magnet movement. Such an offsetting or staggering of the armature magnets distributes the impulses of force imposed upon the armature magnets and results in a smoother application of forces to the armature magnet producing a smoother and more uniform movement of the armature component.
In the rotary embodiment of the permanent magnet motor of the invention the stator magnets are arranged in a circle, and the armature magnets rotate about the stator magnets. Means are disclosed for producing relative axial displacement between the stator and armature magnets to adjust the axial alignment thereof, and thereby regulate the magnitude of the magnetic forces being imposed upon the armature magnets. In this manner the speed of rotation of the rotary embodiment may be regulated.
BRIEF DESCRIPTION OF THE DRAWINGS
The aforementioned objects and advantages of the invention will be appreciated from the following description and accompanying drawings wherein:
FIG. 1 is a schematic view of electron flow in a superconductor indicating the unpaired electron spins,
FIG. 2 is a cross-sectional view of a superconductor under a critical state illustrating the electron spins,
FIG. 3 is a view of a permanent magnet illustrating the flux movement therethrough,
FIG. 4 is a cross-sectional view illustrating the diameter of the magnet of FIG. 3,
FIG. 5 is an elevational representation of a linear motor embodiment of the permanent magnet motor of the invention illustrating one position of the armature magnet relative to the stator magnets, and indicating the magnetic forces imposed upon the armature magnet,
FIG. 6 is a view similar to FIG. 5 illustrating displacement of the armature magnet relative to the stator magnets, and the influence of magnetic forces thereon at this location,
FIG. 7 is a further elevational view similar to FIGS. 5 and 6 illustrating further displacement of the armature magnet to the left, and the influence of the magnetic forces thereon,
FIG. 8 is a top plan view of a linear embodiment of the inventive concept illustrating a pair of armature magnets in linked relationship disposed above the stator magnets,
FIG. 9 is a diametrical, elevational, sectional view of a rotary motor embodiment in accord with the invention as taken along section IX--IX of FIG. 10, and
FIG. 10 is an elevational view of the rotary motor embodiment as taken along section X--X of FIG. 9.
DESCRIPTION OF THE PREFERRED EMBODIMENTS
In order to better understand the theory of the inventive concept, reference is made to FIGS. 1 through 4. In FIG. 1 a superconductor 1 is illustrated having a positive particle flow as represented by arrow 2, the unpaired electrons of the ferrous conducting material 1 spin at right angles to the proton flow in the conductor as represented by the spiral line and arrow 3. In accord with the theory of the invention the spinning of the ferrous unpaired electrons results from the atomic structure of ferrous materials and this spinning atomic particle is believed to be opposite in charge and located at right angles to the moving electrons. It is assumed to be very small in size capable of penetrating other elements and their compounds unless they have unpaired electrons which capture these particles as they endeavor to pass therethrough.
The lack of electrical resistance of conductors at a critical superconductor state has long been recognized, and superconductors have been utilized to produce very high magnetic flux density electromagnets. FIG. 2 represents a cross section of a critical superconductor and the electron spins are indicated by the arrows 3.
A permanent magnet may be considered a superconductor as the electron flow therein does not cease, and is without resistance, and unpaired electric spinning particles exist which, in the practice of the invention, are utilized to produce motor force. FIG. 3 illustrates a horseshoe shaped permanent magnet at 4 and the magnetic flux therethrough is indicated by arrows 5, the magnetic flow being from the south pole to the north pole and through the magnetic material. The accumulated electron spins occurring about the diameter of the magnet 5 are represented at 6 in FIG. 4, and the spinning electron particles spin at right angles in the iron as the flux travels through the magnet material.
By utilizing the electron spinning theory of ferrous material electrons, it is possible with the proper ferromagnetic materials, geometry and magnetic concentration to utilize the spinning electrons to produce a motive force in a continuous direction, thereby resulting in a motor capable of doing work.
It is appreciated that the embodiments of motors utilizing the concepts of the invention may take many forms, and in the illustrated forms the basic relationships of components are illustrated in order to disclose the inventive concepts and principles.
The relationships of the plurality of magnets defining the stator 10 are best appreciated from FIGS. 5 through 8. The stator magnets 12 are preferably of a rectangular configuration, FIG. 8, and so magnetized that the poles exist at the large surfaces of the magnets, as will be appreciated from the N (North) and S (South) designations. The stator magnets include side edges 14 and 16 and end edges 18. The stator magnets are mounted upon a supporting plate 20, which is preferably of a metal material having a high permeability to magnetic fields and magnetic flux such as that available under the trademark Netic CoNetic sold by the Perfection Mica Company of Chicago, Illinois. Thus, the plate 20 will be disposed toward the south pole of the stator magnets 12, and preferably in direct engagement therewith, although a bonding material may be interposed between the magnets and the plate in order to accurately locate and fix the magnets on the plate, and position the stator magnets with respect to each other.
Preferably, the spacing between the stator magnets 12 slightly differs between adjacent stator magnets as such a variation in spacing varies the forces being imposed upon the armature magnet at its ends, at any given time, and thus results in a smoother movement of the armature magnet relative to the stator magnets. Thus, the stator magnets so positioned relative to each other define a track 22 having a longitudinal direction left to right as viewed in FIGS. 5 through 8.
In FIGS. 5 through 7 only a single armature magnet 24 is disclosed, while in FIG. 8 a pair of armature magnets are shown. For purposes of understanding the concepts of the invention the description herein will be limited to the use of single armature magnet as shown in FIGS. 5 through 7.
The armature magnet is of an elongated configuration wherein the length extends from left to right, FIG. 5, and may be of a rectangular transverse cross-sectional shape. For magnetic field concentrating and orientation purposes the magnet 24 is formed in an arcuate bowed configuration as defined by concave surfaces 26 and convex surfaces 28, and the poles are defined at the ends of the magnet as will be appreciated from FIG. 5. For further magnetic field concentrating purposes the ends of the armature magnet are shaped by beveled surfaces 30 to minimize the cross-sectional area at the magnet ends at 32, and the magnetic flux existing between the poles of the armature magnet are as indicated by the light dotted lines. In like manner the magnetic fields of the stator magnets 12 are indicated by the light dotted lines.
The armature magnet 24 is maintained in a spaced relationship above the stator track 22. This spacing may be accomplished by mounting the armature magnet upon a slide, guide or track located above the stator magnets, or the armature magnet could be mounted upon a wheeled vehicle carriage or slide supported upon a nonmagnetic surface or guideway disposed between the stator magnets and the armature magnet. To clarify the illustration, the means for supporting the armature magnet 24 is not illustrated and such means form no part of invention, and it is to be understood that the means supporting the armature magnet prevents the armature magnet from moving away from the stator magnets, or moving closer thereto, but permits free movement of the armature magnet to the left or right in a direction parallel to the track 22 defined by the stator magnets.
It will be noted that the length of the armature magnet 24 is slightly greater than the width of two of the stator magnets 12 and the spacing therebetween. The magnetic forces acting upon the armature magnet when in the position of FIG. 5 will be repulsion forces 34 due to the proximity of like polarity forces and attraction forces at 36 because of the opposite polarity of the south pole of the armature magnet, and the north pole field of the sector magnets. The relative strength of this force is represented by the thickness of the force line.
The resultant of the force vectors imposed upon the armature magnet as shown in FIG. 5 produce a primary force vector 38 toward the left, FIG. 5, displacing the armature magnet 24 toward the left. In FIG. 6 the magnetic forces acting upon the armature magnet are represented by the same reference numerals as in FIG. 5. While the forces 34 constitute repulsion forces tending to move the north pole of the armature magnet away from the stator magnets, the attraction forces imposed upon the south pole of the armature magnet and some of the repulsion forces, tend to move the armature magnet further to the left, and as the resultant force 38 continues to be toward the left the armature magnet continues to be forced to the left.
FIG. 7 represents further displacement of the armature magnet 24 to the left with respect to the position of FIG. 6, and the magnetic forces acting thereon are represented by the same reference numerals as in FIGS. 5 and 6, and the stator magnet will continue to move to the left, and such movement continues the length of the track 22 defined by the stator magnets 12.
Upon the armature magnet being reversed such that the north pole is positioned at the right as viewed in FIG. 5, and the south pole is positioned at the left, the direction of movement of the armature magnet relative to the stator magnets is toward the right, and the theory of movement is identical to that described above.
In FIG. 8 a plurality of armature magnets 40 and 42 are illustrated which are connected by links 44. The armature magnets are of a shape and configuration identical to that of the embodiment of FIG. 5, but the magnets are staggered with respect to each other in the direction of magnet movement, i.e., the direction of the track 22 defined by the stator magnets 12. By so staggering a plurality of armature magnets a smoother movement of the interconnected armature magnets is produced as compared when using a single armature magnet as there is variation in the forces acting upon each armature magnet as it moves above the track 22 due to the change in magnetic forces imposed thereon. The use of several armature magnets tends to "smooth out" the application of forces imposed upon linked armature magnets, resulting in a smoother movement of the armature magnet assembly. Of course, any number of armature magnets may be interconnected, limited only by the width of the stator magnet track 22.
In FIGS. 9 and 10 a rotary embodiment embracing the inventive concepts is illustrated. In this embodiment the principle of operation is identical to that described above, but the orientation of the stator and armature magnets is such that rotation of the armature magnets is produced about an axis, rather than a linear movement being achieved.
In FIGS. 9 and 10 a base is represented at 46 serving as a support for a stator member 48. The stator member 48 is made of a nonmagnetic material, such as synthetic plastic, aluminum, or the like. The stator includes a cylindrical surface 50 having an axis, and a threaded bore 52 is concentrically defined in the stator. The stator includes an annular groove 54 receiving an annular sleeve 56 of high magnetic field permeability material such as Netic Co-Netic and a plurality of stator magnets 58 are affixed upon the sleeve 56 in spaced circumferential relationship as will be apparent in FIG. 10. Preferably, the stator magnets 58 are formed with converging radial sides as to be of a wedge configuration having a curved inner surface engaging sleeve 56, and a convex outer pole surface 60.
The armature 62, in the illustrated embodiment, is of a dished configuration having a radial web portion, and an axially extending portion 64. The armature 62 is formed of a nonmagnetic material, and an annular belt receiving groove 66 is defined therein for receiving a belt for transmitting power from the armature to a generator, or other power consuming device. Three armature magnets 68 are mounted on the armature portion 64, and such magnets are of a configuration similar to the armature magnet configuration of FIGS. 5 through 7. The magnets 68 are staggered with respect to each other in a circumferential direction wherein the magnets are not disposed as 120.degree. circumferential relationships to each other. Rather, a slight angular staggering of the armature magnets is desirable to "smooth out" the magnetic forces being imposed upon the armature as a result of the magnetic forces being simultaneously imposed upon each of the armature magnets. The staggering of the armature magnets 68 in a circumferential direction produces the same effect as the staggering of the armature magnets 40 and 42 as shown in FIG. 8.
The armature 62 is mounted upon a threaded shaft 70 by antifriction bearings 72, and the shaft 70 is threaded into the stator threaded bore 52, and may be rotated by the knob 74. In this manner rotation of the knob 74, and shaft 70, axially displaces the armature 62 with respect to the stator magnets 58, and such axial displacement will very the magnitude of the magnetic forces imposed upon the armature magnets 68 by the stator magnets thereby controlling the speed of rotation of the armature.
As will be noted from FIGS. 4-7 and 9 and 10, an air gap exists between the armature magnet or magnets and the stator magnets and the dimension of this spacing, effects the magnitude of the forces imposed upon the armature magnet or magnets. If the distance between the armature magents, and the stator magnets is reduced the forces imposed upon the armature magnets by the stator magnets are increased, and the resultant force vector tending to displace the armature magnets in their path of movement increases. However, the decreasing of the spacing between the armature and stator magnets creates a "pulsation" in the movement of the armature magnets which is objectionable, but can be, to some extent, minimized by using a plurality of armature magnets. The increasing of the distance between the armature and stator magnets reduces the pulsation tendency of the armature magnet, but also reduces the magnitude of the magnetic forces imposed upon the armature magnets. Thus, the most effective spacing between the armature magnets. Thus, the most effective spacing between the armature and stator magnets is that spacing which produces the maximum force vector in the direction of armature magnet movement, with a minimum creation of objectionable pulsation.
In the disclosed embodiments the high permeability plate 20 and sleeve 56 are disclosed for concentrating the magnetic field of the stator magnets, and the armature magnets are bowed and have shaped ends for magnetic field concentration purposes. While such magnetic field concentration means result in higher forces imposed upon the armature magnets for given magnet intensities, it is not intended that the inventive concepts be limited to the use of such magnetic field concentrating means.
As will be appreciated from the above description of the invention, the movement of the armature magnet or magnets resultsfrom the described relationship of components. The length of the armature magnets as related to the width of the stator magnets and spacing therebetween, the dimension of the air gap and the configuration of the magnetic field, combined, produce the desired result and motion. The inventive concepts may be practiced even though these relationships may be varied within limits not yet defined and the invention is intended to encompass all dimensional relationships which achieve the desired goal of armature movement. By way of example, with respect to FIGS. 4-7, the following dimensions were used in an operating prototype:
The length of armature magnet 24 is 31/8", the stator magnets 12 are 1" wide, 1/4" thick and 4" long and grain oriented. The air gap between the poles of the armature magnet and the stator magnets is approximately 11/2" and the spacing between the stator magnets is approximately 1/2" inch.
In effect, the stator magnets define a magnetic field track of a single polarity transversely interrupted at spaced locations by the magnetic fields produced by the lines of force existing between the poles of the stator magnets and the unidirectional force exerted on the armature magnet is a result of the repulsion and attraction forces existing as the armature magnet traverses this magnetic field track.
It is to be understood that the inventive concept embraces an arrangement wherein the armature magnet component is stationary and the stator assembly is supported for movement and constitutes the moving component, and other variations of the inventive concept will be apparent to those skilled in the art without departing from the scope thereof. As used herein the term "track" is intended to include both linear and circular arrangements of the static magnets, and the "direction" or "length" of the track is that direction parallel or concentric to the intended direction of armature magnet movement.
United States Patent 4,877,983
Magnetic Force Generating Method & Apparatus
Howard R. Johnson
( October 31, 1989 )
Abstract --- A permanent magnet armature is magnetically propelled along a guided path by interaction with the field within a flux zone limited on either side of the path by an arrangement of permanent stator magnets.
Inventors: Johnson; Howard R. (Box 199, 314 N. Main, Blacksburg, VA 24060)
Appl. No.: 799618 ~ Filed: November 19, 1985Current U.S. Class: 310/12; 310/152 // Intern'l Class: H02K 041/00
Field of Search: 310/152,12,46References Cited:
U.S. Patent Documents
USP # 4,074,153 (Feb., 1978) Baker, et al. (Cl. 310/12).
USP # 4,151,431 (Apr., 1979) Johnson (Cl. 310/12).Primary Examiner: Skudy; R. ~ Attorney, Agent or Firm: Fleit, Jacobson, Cohn, Price, Holman & Stern
Claims
What is claimed as new is as follows:
1. In combination with a movable armature, means for guiding movement of the armature along a predetermined path and a permanent armature magnet having magnetic poles of opposite polarity spaced from each other along said path to establish a magnetic field of limited extent movable with the armature and magnetic stator means for establishing a stationary magnetic flux zone along said path, the improvement comprising flux emitting surfaces of one polarity mounted on the stator means on opposite sides of said path for limiting said flux zone through which said path extends and means mounting the permanent armature magnet on the armature with the poles thereof orientated relative to said flux emitting surfaces on the stator means for unidirectionally propelling the armature along said path through the limited zone in response to magnetic interaction between the movable magnetic field and the limited flux zone, said magnetic stator means including a plurality of magnetic gate assemblies fixedly spaced from each other along said path and respectively establishing stationary magnetic fields, each of said gate assemblies including a plurality of interconnected bar magnets substantially bordering said limited flux zone exposing pole faces of opposite polarity in parallel spaced planes intersected by said path, and magnetic means connected to said interconnected bar magnets exposing one of the flux emitting surfaces of said one polarity perpendicular to said parallel planes for magnetic interaction of the stationary magnetic fields.
2. The combination of claim 1 wherein said armature magnet is curved between end faces at which said poles of opposite polarity are located, the end faces being orientated by the mounting means in converging relation to each other toward the guiding means.
3. In combination with a movable armature, means for guiding movement of the armature along a predetermined path and a permanent armature magnet having magnetic poles of opposite polarity spaced from each other along said path to establish a magnetic field of limited extent movable with the armature and magnetic stator means for establishing a stationary magnetic flux zone along said path, the improvement comprising flux emitting surfaces of one polarity mounted on the stator means on opposite sides of said path for limiting said flux zone through which said path extends and means mounting the permanent armature magnet on the armature with the poles faces thereof orientated relative to said flux emitting surfaces on the stator means for unidirectionally propelling the armature along said path through the limited zone in response to magnetic interaction between the movable magnetic field and the limited flux zone, said armature magnet being curved between end faces at which said poles of opposite polarity are located, the end faces being orientated by the mounting means in converging relation to each other toward the guiding means.
4. In combination with a movable armature, means for guiding movement of the armature along a predetermined path and a permanent armature magnet having magnetic poles of opposite polarity spaced from each other along said path to establish a magnetic field of limited extent movable with the armature and magnetic stator means for establishing a stationary magnetic flux zone along said path, the improvement comprising flux emitting surfaces of one polarity mounted on the stator means on opposite sides of said path for limiting said flux zone through which said path extends and means mounting the permanent armature magnet on the armature with the poles thereof orientated relative to said flux emitting surfaces on the stator means for unidirectionally propelling the armature along said path through the limited zone in response to magnetic interaction between the movable magnetic field and the limited flux zone, said magnetic stator means including a pair of permanent magnet assemblies having continuous, confronting pole faces of said one polarity bordering said limited zone, each of said assemblies having means for varying magnetic field intensity in the flux zone along said path, and a second armature magnet connected to the first mentioned armature magnet in mirror image relation thereto.
5. The combination of claim 4 wherein said armature magnet is curved between end faces at which said poles of opposite polarity are located, the end faces being orientated by the mounting means in a plane parallel to said path.
6. In combination with a movable armature, means for guiding movement of the armature along a predetermined path and a permanent armature magnet mounted on the armature having magnetic poles of opposite polarity spaced from each other along said path, the improvement comprising a plurality of permanent magnet gate assemblies mounted in spaced relation to each other along said path establishing interacting stationary magnetic fields along said path, each of said assemblies including stator magnets interconnected in surrounding relation to said path and having pole faces of opposite polarity aligned with parallel planes intersected by said path and magnetic means fixed to the pole faces aligned with one of the parallel planes for interaction of the armature magnet with said stationary magnetic fields for unidirectional propulsion of the armature along said path, said magnetic means being an annular magnet having a radially inner pole surface of one polarity enclosing a magnetic flux zone through which said path extends.
Description
BACKGROUND OF THE INVENTION
This invention relates in general to the use of permanent magnets to generate unidirectional propelling forces.
The generation of unidirectional propelling forces by permanent magnets is already known and recognized in U.S. Pat. Nos. 4,151,431 and 4,215,330 to Johnson and Hartmen, respectively, by way of example. According to applicant's own prior Pat. No. 4,151,431, such forces are generated by magnetic interaction between a curved magnet bar of an armature guided for movement along a circular path and an arrangement of spaced stator magnets having pole faces of one polarity facing the armature on one side thereof parallel to the path of movement.
It is therefore an important object of the present invention to provide certain improved stator arrangements of permanent magnets interacting with a permanent magnet armature for unidirectional propulsion thereof in a novel manner believed to be more efficient.
SUMMARY OF THE INVENTION
In accordance with the present invention, the armature magnet is guided along a path through a magnetic flux zone limited on opposite sides of the path by an arrangement of magnetic pole surfaces of one polarity on stator magnets. According to one embodiment, the flux zone is formed by spaced gate assemblies of magnets having exposed pole faces of one polarity in a plane perpendicular to the armature path from which a magnetic field extends to the opposite pole faces and a ring magnet fixed to such opposite pole faces of the other polarity, with a radially inner pole surface of the same polarity producing a magnetic field perpendicular to the first mentioned field to their opposite radially outer pole surfaces.
According to another embodiment, the flux zone is formed between continuous confronting pole surfaces of one polarity on stator magnets arranged to produce a magnetic field of varying intensity along the armature path.
In yet another embodiment, at least two curved bar magnets are interconnected to form the armature with two pairs of pole faces spaced along the armature path.
These together with other objects and advantages which will become subsequently apparent reside in the details of construction and operation as more fully hereinafter described and claimed, reference being had to the accompanying drawings forming a part hereof, wherein like numerals refer to like parts throughout.
BRIEF DESCRIPTION OF THE DRAWINGS
FIG. 1 is a somewhat schematic side elevational view showing an installation of the present invention in accordance with one embodiment, with parts broken away and shown in section.
FIG. 2 is a transverse sectional view taken substantially through a plane indicated by section line 2--2 in FIG. 1.
FIG. 3 is an enlarged partial sectional view taken substantially through a plane indicated by section line 3--3 in FIG. 1.
FIG. 4 is a top plan view of an installation in accordance with another embodiment of the invention.
FIG. 5 is a sectional view taken substantially through a plane indicated by section line 5--5 in FIG. 4.
FIG. 6 is a sectional view taken substantially through a plane indicated by section line 5--5 in FIG. 5.
FIG. 7 is a simplified side view through the flux zone shown in FIGS. 4, 5 and 6 with the armature bar magnet positioned therein.
FIG. 8 is a top plan view of an installation in accordance with yet another embodiment.
FIG. 9 is an enlarged partial sectional view through a plane indicated by section line 9--9 in FIG. 8.
DETAILED DESCRIPTION OF THE PREFERRED EMBODIMENTS
Referring now to the drawings in detail, FIG. 1 illustrates one embodiment of the invention in which a magnetic armature generally referred to by reference numeral 10 is unidirectionally propelled along a predetermined path established by a motion guiding track 12 fixed to a frame or support 14. The path is represented by a line 16 extending through pole faces 18 and 20 of opposite polarity at the longitudinal ends of a curved armature bar magnet 22. The armature 10 in the illustrated example includes a wheeled vehicle mount 24 to which the armature magnet 22 is fixedly secured with the pole faces 18 and 20 converging toward the guiding track 12. The pole faces 18 and 20 are furthermore orientated so that the magnetic field extending between pole faces 18 and 20 is movable therewith within a flux zone 26 limited in surrounding relation to the guided path at spaced locations by stator gate assemblies 28 formed by permanent magnets fixed to the frame support 14.
Each of the stator gate assemblies 28 as shown in FIGS. 1-3, includes four bar magnets 30 interconnected at corners by non-magnetic elements 32, such as triangular wooden blocks as more clearly seen in FIG. 3, to form a rectangular enclosure in surrounding relation to the track 12. Pole faces 34 and 36 between which a stationary magentic field extends are formed on the bar magnets substantially aligned with parallel spaced planes in perpendicular intersecting relation to the path line 16. The pole face 34 of one polarity (north) is effective through its magnetic field to magnetically interact with the magnetic field of the armature magnet 22 causing unidirectional propulsion of the armature 10 as actually observed during tests. Such magnetic interaction is obviously influenced by the pole face 36 of opposite polarity (south) abutting and fixed to an annular or circular ring magnet 38 magnets 30. The interconnected and 38 may be held in assembled relation by an outer skin or sheathing 40 as shown in FIG. 3.
The ring magnet 38 has a radially inner pole surface 42 of the same polarity (north) as that of the pole faces 34 to interact with the other pole faces 36 as aforementioned, to the exclusion of the radially outer pole surface 44. The obvious effect of said arrangement is to exert a net magnetic force on the armature magnet 22 causing the observed continuous, unidirectional propulsion thereof through the gate assemblies 28. Such assemblies 28 are spaced apart distance dependent on the magnetic field intensity or strength of the permanent magnets 30 and 38 which dictate the effective axial extent of the aforementioned magnetic fields associated with the assemblies 28 and the armature magnet 22.
FIGS. 4-7 illustrate another embodiment of the invention utilizing the same type of movable armature 10 guided along a predetermined path by a frame mounted track 12 extending through a flux zone 46 established by another type of permanent magnet stator arrangement, generally referred to by reference numeral 48. The stator 48 includes a pair of permanent magnet assemblies 50 extending in parallel spaced relation to each other on opposite sides of the armature path established by the track 12. Each assembly 50 is a mirror image of the other so as to expose continuous confronting pole surfaces formed by a magnetic layer material 52 such as Neodynium, mounted on interconnected ceramic bodies 54. The confronting pole surfaces of the magnetic layers 52 are of like polarity (north), opposite to the polarity of the pole surface of magnetic layer sections 56 and 58 made of Samarium Cobalt, for example, and carried on the ceramic bodies 54. The bodies 54 have transversely extending flange portions 60 at the abutting ends so as to mount the layer sections sections 58 laterally outwardly of layer sections 56 as more clearly seen in FIGS. 4 and 6 to thereby vary the magnetic field intensity along the guided armature path within the limited flux zone 46 in which the magnetic fields of the stator assembly 48 interact with the magnetic field of bar magnet 22.
The curved armature magnet 22 is orientated within the flux zone 46 between the confronting pole surfaces on 52 as depicted in FIG. 7, with the pole faces 18 and 20 converging toward the track 12 as previously described in connection with FIGS. 1-3. However, it was found that maximum propelling thrust is produced by optimum location of the path line 16 through the pole faces 18 and 20 a distance 62 closer to the upper edge of surface layer 52 than the lower edge on the frame support 14.
FIGS. 8 and 9 illustrate yet another embodiment of the invention involving the same type of permanent magnet stator arrangement 50 as described with respect to FIGS. 4-7. a modified form of armature 10' is featured in FIGS. 8 and 9, including two curved armature magnets 64 that are mirror images of each other with respect to an intermediate abutting portion 66. The magnets 64 are interconnected at the abutting portion 66 in alignment with a plane containing the path line 16 centrally between the confronting pole surfaces on 52. The end pole faces 68 and 70 for each magnet 64, are aligned with a plane in parallel spaced relation between the path line 16 and the pole surface on 52. With the number of pole faces thereby doubled for the armature, a higher and more efficient propelling thrust may be achieved.
The foregoing is considered as illustrative only of the principles of the invention. Further, since numerous modifications and changes will readily occur to those skilled in the art, it is not desired to limit the invention to the exact construction and operation shown and described, and accordingly, all suitable modifications and equivalents may be restorted to, falling within the scope of the invention.
Magnetic Propulsion System
Howard R. Johnson
( March 28, 1995 )
Abstract --- A magnetic propulsion system including a plurality of specifically arranged permanent magnets and a magnetic vehicle propelled thereby along a path defined by the permanent magnets. The magnetic vehicle which is to be propelled includes a rigidly attached armature comprising several curved magnets. The propulsion system further includes two parallel walls of permanent magnets arranged so as to define the lateral sides of a vehicle path. Preferably, the walls are identical to one another except that the polarities of the magnets which define one wall are opposite from the polarities of the corresponding magnets in the opposite wall. A first wall, for example, includes a series of generally rectangular magnets, each magnet arranged with a North-to-South axis pointing longitudinally down the wall in the intended direction of vehicle travel. Each of the rectangular magnets is separated from the next successive rectangular magnet by a thinner magnet, which thinner magnet is arranged with its North-to-South axis pointing laterally toward the opposite wall and therefore perpendicular with respect to the North-to-South axis of the rectangular magnets. The opposite (or second) wall includes the same general arrangement of magnets, except that the North-to-South axis for each of the generally rectangular magnets is in a direction opposite from the direction of vehicle travel and the North-to-South axis of the thinner magnets points away from the first wall. In addition, the propulsion system includes several spin accelerators.
Inventors: Johnson; Howard R. (1440 Harding Rd., Blacksburg, VA 24060)
Appl. No.: 064930 ~ Filed: May 24, 1993Current U.S. Class: 310/12; 198/619; 310/152
Intern'l Class: B65G 035/06; H02K 041/00
Field of Search: 310/12,152,46 198/619,805References Cited [Referenced By]
U.S. Patent Documents:
4,151,431 ~ Aug., 1979 ~ Johnson (Cl. 310/12).
4,215,330 ~ Jun., 1980 ~ Hartman (335/306).
4,877,983 ~ Oct., 1989 ~ Johnson (310/12).Other References:
Advances in Permanent Magnetism, pp. 44-57 date unknown.
Scientific American, Jan. 1989, pp. 90-97.
Introduction to Magnetic Materials, pp. 129-135 date unknown.
Applications of Magnetism, pp. 42-47 date unknown.Description
FIELD OF THE INVENTION
The present invention relates to a magnetic propulsion system including a plurality of specifically arranged permanent magnets and a magnetic vehicle propelled thereby along a path defined by the permanent magnets.
BACKGROUND OF THE INVENTION
The generation of unidirectional propelling forces by permanent magnets is already known and recognized in U.S. Pat. Nos. 4,151,431 and 4,877,983 to Johnson, and U.S. Pat. No. 4,215,330 to Hartmen, by way of example. According to applicant's first patent (U.S. Pat. No. 4,151,431), such forces are generated by magnetic interaction between a curved magnet bar of an armature guided for movement along a circular path and an arrangement of spaced stator magnets having pole faces of one polarity facing the armature on one side thereof parallel to the path of movement.
According to applicant's second patent (U.S. Pat. No. 4,877,983), the armature magnet is mounted on a vehicle and guided along a path through a magnetic flux zone limited on opposite sides of the path by an arrangement of magnetic pole surfaces of one polarity on stator magnets. According to one embodiment of the second patent, the flux zone is formed by spaced gate assemblies of magnets having exposed pole faces of one polarity in a plane perpendicular to the armature path from which a magnetic field extends to the opposite pole faces and a ring magnet fixed to such opposite pole faces of the other polarity, with a radially inner pole surface of the same polarity producing a magnetic field perpendicular to the first mentioned field to their opposite radially outer pole surfaces. Several other embodiments are illustrated including variations in the armature structure and in the stator structure; however, all of the embodiments teach use of an annular stator assembly.
SUMMARY OF THE INVENTION
It is therefore an object of the present invention to provide an improved magnetic propulsion system having a plurality of permanent magnets and a magnetic vehicle propelled thereby along a path defined by the permanent magnets, wherein the permanent magnets need not encircle the path of the magnetic vehicle.
In order to achieve this and other objects, the present invention comprises two parallel walls of permanent magnets arranged so as to define the lateral sides of a vehicle path. The walls are identical to one another except that the polarities of the magnets which define one wall are opposite from the polarities of the corresponding magnets in the opposite wall.
A first wall, for example, includes a series of generally rectangular magnets, each magnet arranged with a North-to-South axis pointing longitudinally down the wall in the intended direction of vehicle travel. Each of the rectangular magnets is separated from the next successive rectangular magnet by a thinner magnet, which thinner magnet is arranged with its North-to-South axis pointing laterally toward the opposite wall and therefore perpendicular with respect to the North-to-South axis of the rectangular magnets.
The pole-to-pole length of each thinner magnet is preferably no more than half the width of the generally rectangular magnets. Accordingly, a gap on the inside surface of the wall is defined by the presence of each thinner magnet.
The opposite (or second) wall includes the same general arrangement of magnets, except that the North-to-South axis for each of the generally rectangular magnets is in a direction opposite from the direction of vehicle travel and the North-to-South axis of the thinner magnets points away from the first wall.
In addition, the propulsion system of the present invention includes several spin accelerators for crowding the magnetic fields at predetermined positions along the length of the walls. This crowding of the magnetic fields serves to intensify the fields and causes the vehicle's armature to be accelerated faster than would otherwise be the case without the spin accelerators.
The spin accelerators project laterally outward from each of the walls at predetermined positions along the longitudinal length of each wall. Each spin accelerator comprises a generally rectangular permanent magnet which is preferably identical to that of the first and second walls. Each spin accelerator further includes a shorter magnet having a smaller pole-to-pole length than that of the generally rectangular magnet and a wedge separating the generally rectangular magnet of the spin accelerator from the shorter magnet.
The orientation of the generally rectangular magnet in the spin accelerator is determined by which pole of the wall's thinner magnet is facing outwardly. The rectangular magnet's orientation is such that face-to-face contact is established between opposite poles of the generally rectangular magnet in the spin accelerator and the thinner magnet in the wall. Accordingly, the North-to-South axis of the generally rectangular magnet in the spin accelerator points in the same direction as the North-to-South axis of the thinner magnet in the wall. The shorter magnet in the spin accelerator is likewise arranged with its North-to-South axis pointing in the same general direction as that of the thinner magnet in the wall; but here, an acute angular tilt away from the North-to-South axis of the thinner magnet is established by the wedge. In particular, the angle of the wedge determines the acute angle which exists between the North-to-South axis of the shorter magnet in the spin accelerator and the North-to-South axis of the thinner magnet in the wall.
The magnetic vehicle which is to be propelled by the instant propulsion system includes a rigidly attached armature comprising several curved magnets. Each curved magnet is arranged on the vehicle such that its North-to-South axis is parallel with respect to that of the other curved magnets. In particular, the North-to-South axes of all the curved magnets point in the same direction as the North-to-South axes of the thinner magnets in each wall. The vehicle itself is preferably a wheeled vehicle mounted on a track; however, it is understood that other vehicle structures will suffice so long as the vehicle is maintained between the walls of the propulsion system.
In operation, the magnetic fields created by the two walls exert a propelling force on the armature of the vehicle in the desired direction of travel. Since the armature of the vehicle is rigidly attached to the vehicle, the vehicle itself begins to accelerate and is hence set in motion by the propulsion system.
Preferably, the curved magnets of the vehicle armature are "Alnico 8" magnets tipped with neodymium magnets. The magnets which constitute the walls and spin accelerators are preferably made of neodymium and ceramic material, except for the thinner magnets. The thinner magnets are preferably made of rubber or plastic, and each can comprise a plurality of magnetic rubber or plastic layers.
Although the present invention has been described with regard to generally rectangular magnets, it is understood that other permanent magnet shapes will suffice, including but not limited to generally cylindrical shapes.
BRIEF DESCRIPTION OF THE DRAWING
FIG. 1 is a schematic plan view of a magnetic propulsion system in accordance with a preferred embodiment of the present invention.
DETAILED DESCRIPTION OF A PREFERRED EMBODIMENT
With reference to FIG. 1, a preferred embodiment of the inventive magnetic propulsion system and vehicle propelled thereby will now be described.
FIG. 1 schematically illustrates a propulsion system 10 comprising two parallel magnetic walls 12,14 which are stationary, and an armature 16 rigidly attached to a vehicle 18. The two parallel walls 12,14 are formed from several permanent magnets arranged so as to define the lateral sides of a vehicle path. The desired direction of vehicle travel is indicated by an arrow A in FIG. 1. The two walls 12,14 are identical to one another except that the polarities of the magnets which define one wall 12 are opposite from the polarities of the corresponding magnets in the opposite wall 14. A first wall 12, for example, includes a series of generally rectangular magnets 20, each magnet arranged with a North-to-South axis pointing longitudinally down the wall in the intended direction of vehicle travel (indicated by arrow A). Each of the magnets 20 preferably comprises a ceramic magnet with a neodymium north pole. In addition, each of the generally rectangular magnets 20 is separated from the next successive rectangular magnet 20 by a thinner magnet 22. The thinner magnets 22 are arranged with their North-to-South axes pointing laterally toward the opposite wall 14 and therefore perpendicular with respect to the North-to-South axis of the rectangular magnets 20. Each thinner magnet 22 is preferably made from rubber or plastic permanently magnetic material. Also, the pole-to-pole length of each thinner magnet 22 is preferably no more than half the width of the generally rectangular magnets 20. Consequently, a gap 24 on the inside surface of the wall 12 is defined by the presence of each thinner magnet 22.
The opposite (or second) wall 14 includes the same general arrangement of magnets 20,22, except that the North-to-South axis for each of the generally rectangular magnets 20 points in a direction opposite from the direction of vehicle travel, while the North-to-South axes of the thinner magnets 22 point away from the first wall 12.
By arranging the thinner magnets 22 between the generally rectangular magnets 20 in the foregoing manner, there is a pole shading effect on the magnets 20 of the walls 12,14.
In addition, the propulsion system 10 of the preferred embodiment includes several spin accelerators 26 for crowding the magnetic fields at predetermined positions along the length of the walls 12,14. This crowding of the magnetic fields serves to intensify the fields and causes the vehicle's armature to be accelerated faster than would otherwise be the case without the spin accelerators.
The spin accelerators 26 project laterally outward from each of the walls 12,14 at predetermined positions along the longitudinal length of each wall 12,14. According to the preferred embodiment, the spin accelerators 26 are positioned along the walls 12,14 at every other thinner magnet 22 (as is shown in the middle of FIG. 1). Each spin accelerator 26 comprises a generally rectangular permanent magnet 28 which is preferably identical or very similar to that of the first and second walls 12,14. Each spin accelerator 26 further includes a shorter magnet 30 having a smaller pole-to-pole length than that of the generally rectangular magnet 28 and a wedge 32 separating the generally rectangular magnet 28 of the spin accelerator 26 from the shorter magnet 30. The orientation of the generally rectangular magnet 28 in the spin accelerator 26 is determined by which pole of the wall's thinner magnet 22 is facing outwardly. The rectangular magnet's orientation is such that face-to-face contact is established between opposite poles of the generally rectangular magnet 28 in the spin accelerator 26 and the thinner magnet 22 in the wall 12,14. Accordingly, the North-to-South axis of the generally rectangular magnet 28 in the spin accelerator 26 points in the same direction as the North-to-South axis of the thinner magnet 22 in the wall 12,14. The shorter magnet 30 in the spin accelerator 26 is likewise arranged with its North-to-South axis pointing in the same general direction as that of the thinner magnet 22 in the wall 12,14; but here, an acute angular tilt away from the North-to-South axis of the thinner magnet 22 is established by the wedge 32. In particular, the angle .alpha. of the wedge determines the acute angle which exists between the North-to-South axis of the shorter magnet 30 and the North-to-South axis of the thinner magnet 22 in the wall 12,14. The shorter magnet 30 preferably consists of neodymium.
The magnetic vehicle 18 which is to be propelled by the instant propulsion system 10 includes a rigidly attached armature 16 comprising several curved magnets 34. Each curved magnet 34 is arranged on the vehicle 18 such that its North-to-South axis is parallel with respect to that of the other curved magnets 34. In particular, the North-to-South axes of all the curved magnets 34 point in the same direction as the North-to-South axes of the thinner magnets 22 in each wall 12,14. The vehicle 18 itself, according to the preferred embodiment, is a wheeled vehicle mounted on a track 36. It is understood, however, that other vehicle structures will suffice so long as the vehicle is maintained between the walls 12,14 of the propulsion system 10.
In operation, when the vehicle 18 is positioned as is shown in FIG. 1, the magnetic fields created by the two walls 12,14 exert a propelling force on the armature 16 of the vehicle 18 in the desired direction of travel (arrow A). Since the armature 16 is rigidly attached to the vehicle 18, the vehicle 18 itself begins to accelerate and hence is set in motion by the propulsion system 10.
Furthermore, since the spin accelerators 26 serve to crowd and thereby intensify the magnetic fields at predetermined positions along the walls 12,14, the acceleration of the vehicle is enhanced as the vehicle passes these predetermined positions.
The spin accelerators 26 can be reversed in order to lessen their effectiveness at crowding the magnetic fields. Reversing of the spin accelerators 26 can be accomplished by rotating the spin accelerators 26 so that the shorter magnets 30 tilt away from the intended direction of vehicle travel, rather than in the direction of travel as is the case for the illustrated embodiment.
Preferably, the curved magnets 34 of the vehicle armature 16 are "Alnico 8" magnets tipped with neodymium magnets, while the wedges 32 comprise wood or similar material and an angle .alpha. of 45 to 90 degrees.
The width w.sub.20, height, and pole-to-pole length 1.sub.20 of the generally rectangular magnets 20 in each wall 12,13 are 0.75 inches to 1.25 inches, 3.75 to 4.25 inches, and 1.25 inches to 1.75 inches, respectively. The width w.sub.22, height, and pole-to-pole length 1.sub.22 of the thinner magnets 22 in the walls 12,14 are 1 inch to 1.5 inches, 3.75 inches to 4.25 inches, and no more than one half the width w.sub.20 of the generally rectangular magnets, respectively. In the spin accelerators 26, the width w.sub.28, height, and pole-to-pole length 1.sub.28 of the generally rectangular magnets 28 are 1.125 to 1.625 inches, 3.75 to 4.25 inches, and 0.875 inches to 1.375 inches, respectively, while the width w.sub.32, height, and pole-to-pole length 1.sub.32 of the shorter magnets 30 are 0.75 inch to 1.25 inches, 3.75 inches to 4.25 inches, and 0.125 inch to 0.375 inch, respectively.
Preferably, the distance separating the walls 12,14, is such that each wall 12,14 is 0.5 inch to 1.25 inches away from the tips of the armature magnets 34, both walls 12,14 being equidistant from the tips of the armature 16. Also, the curved magnets 34 of the armature 16 are preferably 0.375 inch to 0.625 inch apart from one another.
Testing of the foregoing prototype propulsion system resulted in the vehicle moving 2 feet in one second.
Although the present invention has been described with reference to a preferred embodiment, it is understood that various modifications to this embodiment will become subsequently apparent to those having ordinary skill in the art. In this regard, the scope of the invention is limited only by the claims appended hereto, and not by the illustrated embodiment.
Tom Bearden Comments
( Cribbed from www.greaterthings.com )From: "Karl" <krlbrgmnn@mailandnews.com>
To: "Sterling D. Allan, PerenTech.com" <sterlingda@perentech.com>
Sent: Thursday, December 19, 2002 2:01 PM
Subject: Truth about Howard Johnson and his motorSterling,
Just a quick note to let you know I spoke to Tom Bearden today and, regarding the statement on your webpage by your "anonymous source" who said "Howard Johnson never was able to get the rotary version to work. He was only able to get the linear version working, and there were some questions about its viability.", Tom said such a person doesn't know what they are talking about. I'd say Tom is in the best position to know, since he and Howard have been friends for decades and Howard has personally brought a functional, rotary PMM to Tom's house, and they've played with it for hours. Next to Howard himself, I'd consider Tom to be the best resource on the subject of HJ's PMM.
He also said that Howard is still working on getting another functioning unit constructed (he's had numerous setbacks over the years after his working unit was vandalized by thieves that broke into Howard's shop and stole only the magnets off that model, leaving many $K worth of other material nearby untouched). Howard is still plugging away every day, at over 70 years old, but his wife's health problems are keeping him busy. However, he has gotten hooked up with a respectable, honest businessman who is financing him and Howard also now has some younger help to do the grunt work that is becoming tougher for him. All in all, Tom hopes to see some real progress being made for Howard in the next year or so.
Tom mentioned that there are a few critical things that anyone who wants to successfully build a working HJ PMM needs to know, some of which are probably obvious to the more experienced builders:
1) The most critical element is the precise machining of the magnets. Joe Q. Public, with his diamond saw, cutting his own magnets by hand has little chance of succeeding in shaping the magnets to the aerospace-critical specs that are the minimum necessary, much less duplicating that feat several times for each necessary part.
2) Alignment of the parts is highly important too. One slight misalignment and the motor will not run continuously.
3) All magnets aren't the same. This application requires expensive, extremely high quality magnets. Howard, in order to get them cheaper, was buying them in $50K lots from China, where high quality and a lower price can be had.
I also spoke with a gentleman named Gary Hanson who had been in touch with Howard years ago when Gary was trying to build Howard's motor. Howard told him, as I think most researchers on this know now, that the motor *can* be build directly from the patent but that there needs to be 5 or 6 armtures and not just the one that is shown as an illustration in the patent. Just want to make sure any newbies understand this.
I hope some of this has helped clear up any misunderstandings for those of us interested in building a functional HJ PMM. My opinion is that, if you want to do it right, go to the horse's mouth (Howard) or else as close as you can possibly get (Tom). Hopefully, doing so will enable us to make this motor a reality.
Regards, Karl
Tom Bearden: Chasing the Wild Dragon [Excerpts from www.cheniere.org ]
Howard Johnson is also a respected colleague, whom I very much admire. (See Figure 23). Howard has continued to work quietly and patiently upon his patented permanent magnet motor, [note 31] including patenting various magnetic gates, etc. that are necessary to make such a motor work in a rotary configuration. [note 32] Howard employs a two-particle theory of magnetism; i.e., each magnetic flux line is envisioned as having a particle traveling from the north pole to the south pole, and also a particle traveling from the south pole to the north pole. The particles are spinning; the forward-time particle spins in one direction, and the antiparticle spins in the other direction. Howard then slightly separates the two particle flows. [note 33] In other words, Johnson splits the flux lines themselves, into two different pieces. When so separated, the component lines are now curls, so their paths curve. The paths of the two "curl particles" are different; one curls in one direction and the other curls in the opposite direction. Further, a predominance of one form of curl particle gives a "time-forward" aspect, while a predominance of the other form of curl particle gives a "time-reversed" aspect. Johnson is thus able to employ a deeper kind of magnetism than the textbooks presently contain. He demonstrates that a "spin-altered" magnetic assembly exhibiting (to a compass or other such detector) a north polarity can attract another unaltered magnetic assembly exhibiting a north polarity. In short, he can make a north pole attract a north pole. We will give you further insight into Johnson's two-particle theory in a future article. [note 34] We will also explain how and why the physicists missed that antiparticle in the magnetic field's flux lines, and thereby failed to advance the theory of magnetism to a deeper level. Make no mistake, one day when the new theory is done, Johnson may well be awarded a Nobel Prize for his epochal discovery of a deeper structure of magnetism.
Footnotes:
[32] I personally saw and closely examined one demonstration rotary Johnson permanent magnet motor some years ago, and toyed with it for about one hour. It would definitely self- rotate as long as you wished to permit it to turn. It was not a powerful device at all, but just a small laboratory "proof of principle" prototype. It had cost Johnson an enormous amount of time, labor, and optimization to get the critical adjustment required of his two magnet assemblies. But the device had no power source other than the permanent magnet assemblies themselves. Johnson's nonlinear rotor and stator magnets interacted with each other in a manner to break local symmetry. So his machine was an open system and therefore a permissible overunity device; it was not a perpetuum mobile.
[33] As I have pointed out repeatedly in the past, photons also carry time, not just energy. We have previously shown the process and the photon interaction mechanism that creates the flow of time itself; we will discuss this mechanism in the future. So when Johnson separates the particles and antiparticles, not only does he partially separate them according to spin, but he also alters the local character of time flow during which the resulting magnetic field forces must appear. In other words, he accomplishes a partial separation of time-forward and time- reversed polar interactions. A south pole is just a time- reversed magnetic north pole, in the first place! So a north pole of a bar magnet that is slightly time reversed on one side will partially act on that side just like a south pole. On the other side it will continue to act like a normal north pole. By partially time-reversing (phase conjugating) one side of the north magnetic pole piece, Johnson makes that side look and act like a south pole. that way Howard is able to create two north poles, one on a stator and the other on a rotor, and time-reverse part of one face of the stator's north magnetic pole-piece. Therefore when the proper sides of the stator and rotor north poles are facing, they attract each other, contrary to the conventional textbook. The two poles then repel each other normally as soon as the north rotor poles passes the north stator pole. Hence Johnson can make a surrounding north pole stator assembly "draw in" an approaching north pole rotor assembly, and then kick it on out the other side, because he has broken the local magnetic symmetry. In short, Johnson's magnetic gate can provide a legitimate component of unidirectional magnetic thrust, which means that he can indeed make a rotary permanent motor. Simply put, this "partially separating the spin particles," and thereby partially phase conjugating one face of a magnet, is what Johnson calls a "gate," and this is the patented secret by which his magnet assemblies can be made self-powering. The entire process is still very meticulous, and assembly and adjustments are extremely critical. With Johnson's blessings we hope to shed more light on this subject in coming articles.
[34] For a basic article on rotary permanent magnet motors, see T.E. Bearden, "On Rotary Permanent Magnet Motors and 'Free' Energy," Raum & Zeit, 1(3): 43-53 (Aug.-Sep. 1989).
Liberty Research
Johnson Motor Construction Plans
[ Click to Enlarge ]
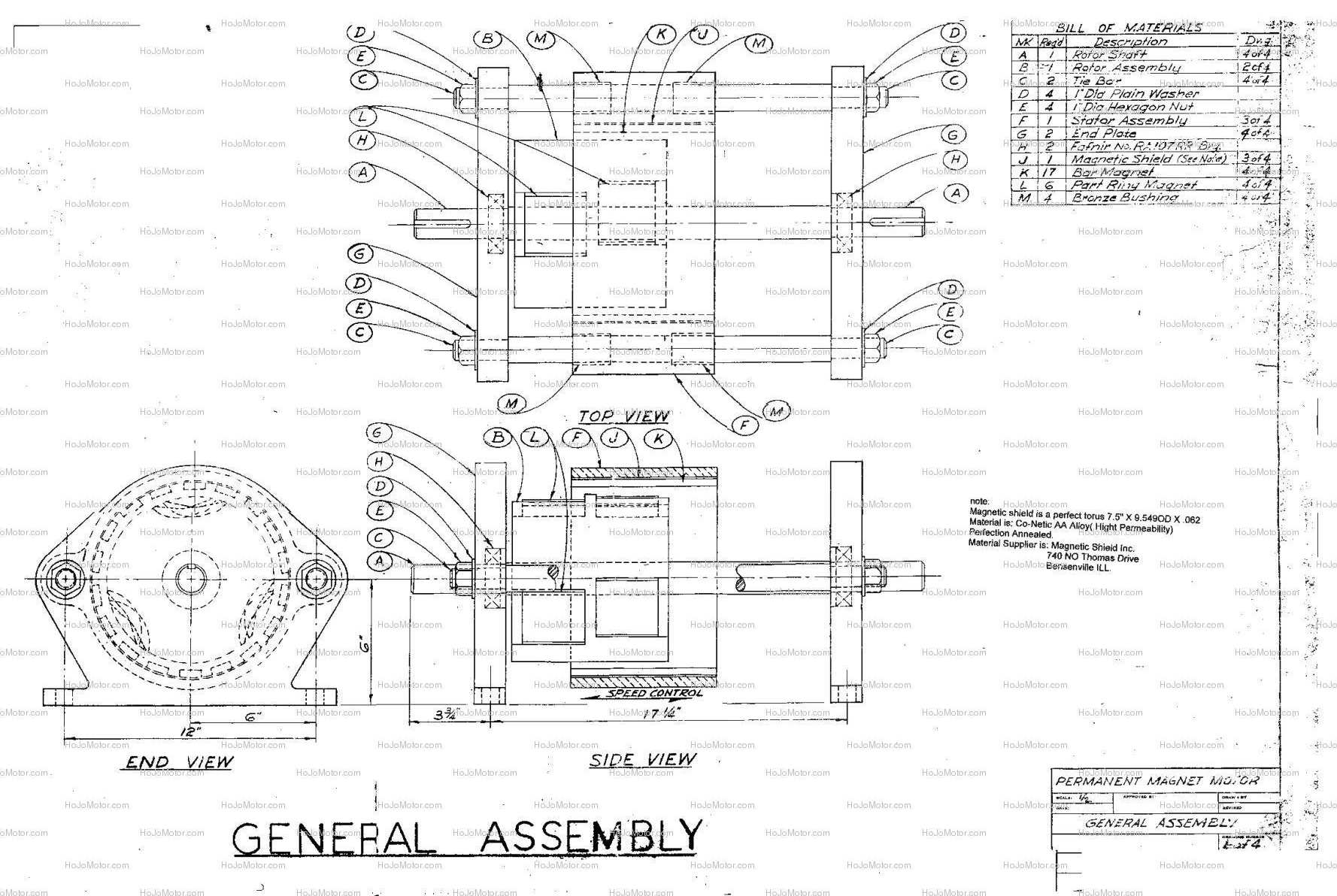


Assembled

Chassis

Endplate

Magnetic Shield

Motor-Rotor
Rotor-Magnet
Rotors
Rotor Magnet Spacing Tool
Stator
Stator-Rotor-Chassis














































