Paul MONUS
"Permanent Magnet Motors --- Build One"
Paul Monus, BSEE,
BSA
Published by the Author (Cleveland OH 1982)
Copyright 1982 by Paul Monus
To all those who know that the impossibilities of yesterday are the facts of today, and firmly believe that the impossibilities of today will be the realities of tomorrow. --- Paul Monus
Contents
Foreword
Introduction
1. What You Must Know Before You Start
Working
2. About the Materials
3. Permanent Magnet Linear Motor
4. How it Works
5. The Tilted Track Linear Motor
6. How Can We Remove a Magnetic Load from
a Permanent Magnet Track?
7. The Oscillating Permanent Magnet Motor
8. The Circular Track Motor. Cascading the
Stages
9. The Wheel as a Rotor
10. Electronic Circuits for Driving and
Timing
11. Possible Energy Resources
12. Conclusions
13. Bibliography
I was not searching for perpetual motion. If you think so, I must disappoint you.
As an electrical engineer down to earth, and a long time research worker, I was very well aware, that there could be no such thing as perpetuum mobile. You can’t cheat the laws of nature.
You can build a new type of prime mover, a new motor, or any mechanical device with one condition: the driving energy must come from somewhere. I will discuss the energy sources in Chapter 11 of this book.
We cannot produce energy. We can only transform it from one form to another. How well we can transform is called efficiency. I have been looking for new and more efficient transformation possibilities. How I succeed, will now be presented to you.
If you have an inquiring mind, and you will use my results and create more and practical machines, after first working them out on paper. All are unique, and working perfectly. In exposition I will be very critical of myself. If you will follow my guiding principles, you must succeed. In case of failure, look for cause in yourself.
For some explanations I must use mathematics. I have tried to curb it to a minimum. If you are not mathematically inclined, please skip over the calculations. This will not affect you final work. A practically minded person can succeed as well without it.
Finally I will be very happy if I will; hear from you.
And now to work!
The Author
The idea of getting something for nothing is as old as man’s discovery of the basic rules of elementary mechanics. The invisible magnetic forces, which had provoked the inquiring minds, played a substantial role in this heretofore unsuccessful, fruitless hunt. When an ordinary horse-shoe or bar magnet can catch a piece of iron, and hold it with astonishing force, the question is obvious, could not the same force provide useful work which will cost nothing beyond the price of the magnet?
I cannot give you a straight answer. It could be an irresponsible talk, and eventually the upcoming generation could ridicule me. Moreover I cannot discredit my own work, which results I now want to submit to you. However, I owe to you some explanations before we start on the dilettante’s esoteric, but for the physicist or engineer, quite clear world of magnetism.
Magnetism is a natural phenomenon which is governed by the known, or perhaps some as yet unknown, natural laws. First of these is the basic and universal law of conservation of energy. The energy conservation law is the pillar of the universe. Energy cannot be created and cannot be destroyed. No person has ever succeeded in doing it and no person ever will. The one thing we can do is transform energy from one state to another. This is what I did when I created my motors.
It is a well known scientific fact that the permanent magnets are storehouses of energy, what we put in by magnetization. At least we must be able to recover part of this energy if the conservation law is to be upheld.
I must warn you to be very critical of learning devices which are described elsewhere or even patented. The inventor can mislead you, perhaps not willingly, but by his own credulity or misunderstanding. This has been my experience. I have studied, rebuilt and tested dozens of inventions which turned out to be worthless. I want to spare you from any frustration or what is worse, wasting money and time.
I would like to suggest that you not try to start with the most advanced forms of my motors. Although they have been running at my laboratory a long time, they are far from finished. They need a lot of experience and knowledge of electro-mechanics in design work and a well-equipped workshop for electronic impulse techniques. A good example is my timer-device, which will be difficult to build and correctly adjust without a good storage-oscilloscope.
You need not use the same building materials I did. Any non-magnetic material will work, perhaps even wood. Balsa wood, the building material of airplane model builders will serve very well. You can use any type of magnets depending on your financial limitations. This question will be dealt with in detail in Chapter 2.
I am of the opinion that the best way to start is to build the simplest form of my motors, i.e., the single-sided double action linear motor. It is also the cheapest. After you become thoroughly familiar with its working principles and rules, you can go further. Who knows, you may get ideas and create something new and quite different from my motors. The principle is given by me, the remainder depends on your ingenuity.
If you need more information, please look up the bibliography at the end of this book. I am convinced it will help you.
Finally please excuse my form of expression. My choice of words was a difficult one. This booklet was intended for use by a wide range of readers, by experts as well as by hobbyists. The expert will be able to read beyond the lines. The hobbyist or amateur-scientist on the other hand will be able to understand it without difficulty.
What You Must Know Before You Start Working
In everyday language matter is either magnetic or non-magnetic. Magnetism is a property possessed by certain materials. Actually all materials react in some slight degree to a magnetic field.
Characteristic of magnetic behavior of materials is its permeability and coercivity. The first is the measure, how much better a given material is than air as a path for magnetic lines of force. Its symbol in mathematical formulas is u (the Greek letter of Mu). The second, the coercivity, is the measure of the resistance of the material against demagnetizing forces. Higher coercivity materials need higher demagnetizing force.
The magnets are divided into two different classes: permanent magnets, which are magnetic materials so strongly magnetized that they retain the magnetism indefinitely, and electromagnets, which are temporary magnets consisting of a solenoid with an iron core and a magnetic field exist only while current flows through the solenoid. You will work with both of these magnets.
The areas of a magnet where the magnetism seems most concentrated are called Poles. The north-seeking end of the bar magnet is called the North pole of the magnet (N) and the other end is called the South pole (S). Regarding the magnetic forces, like poles repel, unlike poles attract each other. Either pole attracts unmagnetized magnetic material.
A magnet is surrounded by a magnetic field. This is a region of space where the effects of magnetism can be detected.
Characteristic of each magnet is the strength of field which it generates, or field intensity, H. Another characteristic of the magnetic flux (Greek letter Phi), and flux density B which is the number of lines of force per unit area.
Mathemathically the above characteristics can be written,
![]()
(1) B = Phi / A
and
(2) Phi = B.A
where A is the area of the region. Please keep in mind these simple correlations.
Another important characteristic of a magnet is the magnetic induction or flux which remains in a magnetic circuit after the removal of an applied magnetization force. This is the so-called remanence, its symbol is Bd.
The magnetization force or magneto-motive force (mmf) which is analogous to the electro motive force of electric circuits (emf) of magnets is given in Ampere-turns. The symbol of magneto-motive force is M and abbreviation (mmf). You must remember that each permanent magnet could be replaced by its counterpart, an electromagnet with an adequate coil, that is to say Ampere-turns, which produce the same flux phi as the permanent magnet. Some times this is a very important simplification of calculations.
In mentioning the analogy of magnetic and electric circuits, each magnetic circuit has a resistance against the magnetic flux, like the resistance of an electric conductor against current flow. Here it is called reluctance. Its symbol is R and is mathematically expressed:
![]()
(3) R = M / Phi
When a volume of magnetic material is magnetized, energy is expended. When the magnetizing force is removed a portion of the energy is returned to the source of energy. Part of the energy, because of molecular friction in magnetized material is converted to heat. This heat is a waste of power and is termed hysteresis loss. For a magnetic material, the curve showing two values of magnetizing flux density B, as a function of magnetic force, or in other words, of magnetic strength H, one value when the magnetizing force is increasing and the other when it is decreasing, is called the hysteresis loop of the material. The hysteresis curve in other words represents the magnetic history of material. A typical hysteresis loop of a magnetic material is on Figure 1.
Figure 1

The most important part of this B-H loop is the left hand upper quadrant. The line O-B gives a picture of residual magnetism, or retentivity. For permanent magnets the manufacturers normally enclose this part of loop which can tell the consumer what he can expect from a given magnet.
The two pole magnetism phenomenon shows that there must exist some symmetry in field form and consequently a symmetrical energy distribution in each magnet.
The energy that we put into one magnet by magnetization,
(4)
![]()
where V is the volume of the magnet, B is the flux density Mr the permeability of material and Mo is the permeability of air.
All permanent magnets or permanent magnet systems, relative to the stored energy in the system, have a symmetry point or better yet a symmetry wall, where the polarization of domains changes by 180°. This must not necessarily be identical with the symmetry axis or point of the system. This fact has a very important consequence. Because the symmetrical energy distribution of magnetic forces (attractive or repulsive) depending on this symmetrical energy distribution to introduce a magnetic material object to the field, will produce as much work as will be required to remove that object from the field. There can be no energy gain, no matter if one magnet, or a system of multiple magnets mutually positioned in whatever manner is involved. Therefore by calculations of movement of any ferromagnetic material of arbitrary shape in a magnetic field, the effect of the energy of the whole system must be considered. This point is where most mistakes occur for many investors and hobbyists who think that an unsymmetrical positioning of magnets can produce perpetual motion. This mistake is sometimes made by the Patent Offices also granting patents for equipment which cannot work.
The force exerted by one magnet to another divided by a gap of area Ag is:
(5)
![]()
For a given magnet or system of magnets (a magnetic track), we can plot the curve of this force in a diagram. He force curves give us a proper view of how this magnet can perform usable work. Such curves are depicted for a bar magnet in Figure 2. They are the so-called force-distance diagrams which give us a perfect image if driving power along the considered magnet.
Figure 2

Figure 2 shows that the force distribution to the zero force point is symmetrical along the whole magnet. The shaded areas under the force curves are proportional to the energy distribution along the magnet. If a magnetic object will enter into this system field from one pole side with a kinetic energy To, after passing the field, it will possess the same energy as when entering. This is no energy gain. On the contrary, the energy will be less if the frictional forces will be considered.
It will be very edifying to look at an example, where there is no one single magnet, but a certain magnetic rack, composed of multiple magnets positioned with progressively increasing gaps in between them. See Figure 3:
Figure 3 ~

From Figure 3 it is apparent that the zero point in this case is shifted to the left. It is no longer in the symmetry axis of the system if geometrical symmetry is considered. The maximum values of the magnetic forces are different. Nevertheless the shaded areas, which represent the energy on both sides from the zero force point are the same in magnitude. Consequently there is again no net energy gain by any magnetic object passing through the field.
The same is valid for a mechanism which may work by shading the magnetic field. It could be done by ferromagnetic materials only which must be introduced and again removed from a certain field.
How we can overcome the above difficulties we will discuss by constructing my motors.
Chapter 2
About The Materials
(A) Magnets:
The magnets are divided into two main groups: permanent magnets and electromagnets. Building my motors, you will work with both sorts. The electromagnets will be discussed in Chapter 6.
The permanent magnets can be divided into three main groups: metal, powder and ferrite groups.
In the first group fall the hard steel and cast alloy magnets. They are sold under different commercial names: Alnico, Permaloy, Cunife, Martensitic Steel, etc. The common characteristic of these metal magnets is the very high cost. The cast alloys must be ground to size while the hard steels are readily machined. They have high field intensity and are able to produce high flux. Their disadvantage is that they are very sensitive to external demagnetizing forces. Under mechanical influences like shaking oir hammering, they rapidly loose their magnetization. They need a soft iron keeper across their poles, or they will very soon dissipate the stored energy to the surroundings. Improperly polarized external magnetic fields could destroy them in a matter of seconds. Briefly, they are suitable, clean, but expensive and need expert handling. I very seldom use metal magnets for my experiments. My main use of them was for field adjustments and removing loads from my permanent magnet tracks. Of the second group, the most important are the rate-earth magnets. If you need very high power and small size you must use them. They are the smallest size giants among all the magnets produced today. They offer performances that some years ago engineers and technicians would never have dreamt. They are almost immune to self demagnetization and have an unusually high energy output. Hey are specified mainly for rotor applications, especially where the rotor must run upwards on a slope.
Of the rare-earth magnets the most common used and known are the Cobalt-rare earth magnets, such as the Crucible Magnetics Srucore-12 series. They are available in ring, disk, square or arc forms. Their price high and for higher performances they are indispensable. Unfortunately, experimentation in magnetics is a costly business.
The low energy plastic bonded iron powder magnets include first the rubber flexible magnets. They can successfully replace the Barium-ferrite ceramic magnets which will be discussed later. They are cheap, easily workable and can be bent into any shape. The energy stored in a volume unit is comparable with those of Barium-ferrite magnets. They are suitably stable, not sensitive to external fields and other demagnetization effects like rough mechanical handling.
The only disadvantage of flexible rubber magnets is that they are produced as flats of a maximum thickness of 0.250 inches, magnetized through thickness. For higher energy requirements, therefore, they must be put as layers for the necessary thickness. My permanent magnet tracks need a magnetization through the width. Nevertheless, lately I use this type of magnets almost exclusively.
The work horses of permanent magnet tracks are the ferrite magnets. The most commonly used are the Barium-ferrite ceramic magnets. They are readily available, reliable and cheap. You can buy them in almost any desired form. You will mostly need rectangular and ring magnets with holes.
The Barium-ferrite ceramic magnets are very stable and are almost immune to demagnetizing forces, also. They have good power output and are easily mounted. Coupling up makes possible construction of any desired track size. Their only disadvantage is brittleness. They must be handled with care.
The Barium-ferrite ceramic magnets are produced as isotropic which means that their magnetic properties are the same value along their axes in all directions. They can also be anisotropic, which means they have better magnetic characteristics along one axis than any other. It is obvious that for permanent magnet tracks the anisotropic magnets are better because they have a certain flux concentration in one direction inherently. Another interesting properly of Barium-ferrite magnets is that they have an almost straight line demagnetization characteristics.
In designing and building permanent magnet motors, the selection of proper type of magnet is important. You can save or lose money for no reason at all. At the end of this book you will find sources where you can buy any kind of magnet for your construction.
(B) Other Construction Material:
For connecting, supporting and holding your magnets you will need different magnetic and non-magnetic materials.
The magnetic materials are the so-called soft magnetic materials which become magnetic only after contact with a permanent magnet or magnet field. Ordinarily cold-drawn steel is generally used because of its low cost and general availability. You will use mainly flats and strips. Here the only requirement you must comply with is that the material must be well cleaned. The surfaces that will be in contact with magnets must be well sanded. You must not forget: better contact, better performance. Other than contact surfaces must be protected against corrosion by covering with a suitable paint.
I suggest that prior to cutting or machining soft magnetic materials that you will use for electro-magnets as core material, that you heat it up to cherry-red and let it cool down slowly. With this heat treatment, the steel will be softer and better usable as core material.
For fastening, brass material and screws must be used exclusively to avoid unnecessary flux leakages. A steel screw flux leakages. A steel screw through a hole in ceramic magnets is like a shorted electric circuit. You must absolutely avoid them.
Covering materials for tracks, plastics must be used. One 1/8 inch plexiglass sheet will do it. You can use material other than Plexiglas but the friction relations will be changed. Nonmagnetic metal sheets, like aluminum, brass, etc., are more expensive and have the disadvantage of slightly weakening the magnetic flux and are expensive. Plastic material is more transparent for magnetic flux.
For rotor (roller) coverage you can use a plexiglass tube of 1 and 1/8 inch ID, although covering is not absolutely necessary. The ceramic magnet rings have a hard and ideally smooth surface. If properly adjusted they will run well without any cover also.
Brackets, feet, supports could be made from any non-magnetic material. The best again are plexiglass or aluminum. Plexiglass could be very easily glued together and aluminum can be bent into any shape.
The beauty of my advanced types of permanent magnet motors is that they can be built from any non-magnetic material. Except for the shaft, electromagnet and ceramic magnets, the whole motor could be built from wood. If Balsa will be used, your motor will be bantam weight.
The Permanent Magnet Linear Motor
This motor is a single sided double action motor. The propulsion is primarily from the interaction of the fields of the moving magnet and the track. The theory of how it works will be discussed in the next chapter. This chapter will give instructions on how to build it. See Figure 4.
Figure 4

The permanent magnet track 1 of the motor is built from ceramic Barium-ferrite permanent magnets such as Indiana General Index 1-F-1201. You will need 31 x 5 totaling 155 pieces. Each magnet measures 1 x 3/4 x 3/16 inch thick.
The magnets will be set up in blocks of 5 pieces, N pole facing S pole. It is impossible to set them up differently because the magnet will automatically jump to the correct direction. Two flat bars, 3/4 x 1/4 inch, from cold drawn steel will be cut to 3 inch lengths. After thoroughly sanding all surfaces, the medians of the flat bars will be divided and marked by 1 inch distances. The first mark starts from 1/2 inch from one end of bars. The markings will be 3/16 inch clearance holes.
The five magnet blocks will now be sandwiched between the two flats all oriented in the same manner, so that one of the flats of soft iron will be a N magnetic pole. For fastening use 3/16 x 1 and 3/4 inch length brass bolts. Because like manner oriented magnet blocks repel each other, the setting is difficult. The best way is to start with the two end blocks and after fastening with bolts to push one block after the other into the gap. Be careful, if you reverse only one of the blocks, what can happen very easily is, because the reversed polarity blocks attract each other, your track will not work. After fastening all blocks with bolts, the driving part of your track is ready. One flat will now be the N pole and the other an S pole.
Three inches from both ends of flats holes will be drilled and threaded for 5/16 inch bolts. They will carry the track on brackets. The bolts will pass through 1 inch long spacers and wing nuts.
The track top will be covered by a 1/8 inch thick and 36-1/2 x 3 inch plexiglass sheet. One end of the sheet will be flush with the end of the track. The other end extends beyond the track by 5-1/2 inches. Beneath the track a similar sheet 31 x 3 inch with both ends flush with the track end will be fastened. For fastening you can use small 4-40 x 1 inch brass screws. The track carrying brackets will be cut from 1/8 inch thick aluminum sheet. Sizes see Figure 4, labels 4 and 5. If you do not have a piece of aluminum sheet at hand, a piece of plastic or wood will do also. Of course, you must comply with the sizes as given in Figure 4. The two brackets on front, labeled 4, must have a two inch long split for the holding bolts, enabling the adjustments of track towards the horizontal plane.
As base plate a 41 x 6 x 1/2 inch plywood can serve. The brackets of the track could be fastened by wood screws to the base plate.
If you desire a better appearance of your work, you can paint your base plate and brackets.
The rotor (roller) will be constructed from three pieces of ceramic magnet rings, such as Indiana General Index 1-F-1403. Each one is one inch in diameter and 1/4 inch thick at its center point having a hole of 3/8 inch diameter pushed through their central holes. The roller must be clean and well adjusted to avoid wobbling on the track. It must run smooth and noiselessly. Noisy running means poor alignment, the roller has some eccentricity. Remember that any other similar circular motion requires power, and this will be taken from the kinetic energy of the rings. Therefore, there are losses which, if of substantial magnitude, can disturb the proper functioning of your motor.
If you want to avoid this kind of trouble, you can press the three tings, after previously adjusting on its shaft, into a plastic tube of 1-1/8 inch ID and 1-1/4 inch OD. The ends of the tube can be cut by both ends about 1/8 inch longer and covered with a round piece of plexiglass sheet.
Although the above measures are not absolutely necessary, the motor will work well using uncovered roller also. If you still want to use a covered roller, it will be necessary to finish off the far end of the track with a small plexiglass plate positioned high enough so that it will not prevent the free passage of the roller beyond the track, but it will prevent it from falling off the track. The tube cover therefore represents a gap between the track end and the roller magnets which in turn weakens the attractive force between them. What can happen if this is the case, you will learn in the next chapter.
If you are less pretentious, you can build a simple track using flexible rubber magnets like 3M Plastiform Brand, or other products. See Figure 5.
Figure 5

Two pieces of soft iron strips, labeled 2 in Figure 5, measuring 1/2 x 3/4 x 26 inch length, will be cut to size. On the one end of both flats will be a part of 1/4 inch width in depth of 2-1/4 inch cut off. After assembling this will form a fork, one inch width, for catching the roller.
In between the two flats will be sandwiched two strips of permanent rubber magnets of two feet length. Thus each of the rubber magnets measures 1/2 x 1/4 x 24 inches in length. The magnets are magnetized through its thickness. Both together will form a square cross-section bar of 1/2 by 1/2 inch size. One bar surface will be polarized as N pole and the other as S pole. After setting the magnets between the flats, the whole track will be held together merely be magnetic forces; no fasteners will be needed.
The top of the track could be covered by a 1/8 inch thick plexiglass sheet, labeled 6 in Figure 5, of 2 x 29 inch in size. One end of this glass cover will be set flush with the far end of the track. The other end extends beyond the track about 3 inches. The bottom cover of size 24 x 2 inches, will be set flush with the far end of the track. The other one will extend about 1/4 inch beyond the rubber magnet over the fork part of the track. For fastening the covers to the track, small screws (brass) 4-40 one inch long, may be used.
The positioning of the track carrying bolts and bracket sizes, you may find in Figure 5.
The roller is the same three ring magnet as was described for the 31 inch track.
Despite its simplicity and low cost, this small motor will perform well, of course with less power than the 31 inch ceramic magnet track.
After finishing the assembly work, the surfaces of glass coves must be cleaned thoroughly using a good plastic cleanser.
The finished motors must be set horizontal on a suitable tabletop and they will be ready for running.
Chapter 4
How It Works
It is a well-known fact that the purely magnetic forces cannot be used to provide continuous motion. A permanent magnet can perform work only:
(a) if mechanical work will be used for replacing the magnet to repeat the cycle;
(b) If an external force field will interact to restore the initial state;
(c) If electromagnetic force will be used which will change the permanent magnet field conditions.
The first condition is generally known. This is for example what we do when we lift a piece of iron from the table by a permanent magnet. Classical examples are the permanent magnet chucks.
The second condition is widely used in DC permanent magnet motors or in AC reluctance or hysteresis motors.
The third condition is somewhat less known. The most common example is a permanent-electro chuck.
The impossibility of creating continuous motion by using purely magnetic forces was already discussed in Chapter 1. The cause is the symmetry law. How can we overcome the symmetry law and create uni- or bi-directional motion merely by using permanent magnets?
The aforesaid symmetry law and energy conservation law enables us to use these phenomena under certain circumstances, for generating unidirectional or bi-directional motion.
To understand the function of the Permanent Magnet Linear Motor, we may discuss the force-distance characteristic curves of the track. They are similar to Figure 2 and are depicted in Figure 6 for our track.
Figure 6

Figure 7

The roller is placed at the launching point of track A and held there. At this point the roller has a potential energy, represented by pulling power P between track-roller separated by a gap g of area A (square meter); Equation (5b).
(5b)
From the force distance curves in Figure 6, it is apparent that this force is symmetrical to the symmetry axis of the track.
After releasing, influenced by the track’s attractive power, the roller will start rolling toward the track. Since both the magnetic force on the roller and the roller’s weight constrain the roller to remain on the plexiglass cover. The horizontal propulsion on the roller comes from the interaction of its magnetic field with the change in the magnetic field through which it passes.
The work done moving the roller along the first half of the track is:
(6) W1 = P1 s1
This work will be equal to the work done along the second half of the track where the roller, because of the change of the direction of magnetic forces, will be decelerated:
W1 = W2
(7) P1 s1 = P2 s2
The roller will be accelerated from starting point A toward the end of track B, and it continues to accelerate propelled by the track forces toward the midpoint C. As the roller approaches this point, the propelling force diminishes and finally vanishes. However, the roller does not stop at the point C, where the field because of the momentum it possesses. Overshooting the point C, the roller continues toward the far end of the track and gradually decelerates. Its potential energy at point A was changed by its acceleration to kinetic energy. From point C it started changing back again to potential energy. To point D it arrives possessing kinetic energy gained in section A-C, less the energy losses by rolling friction on the track surface Er, and by introduction Ei. Thus,
![]()
Suppose that the plexiglass covering of the track extended beyond the point D. Then the roller because of its momentum will overshoot the track end a t D, and continue to move toward point E until its kinetic energy vanishes. It will come to stop when:
![]()
If the losses Er and Ei are significant, then the roller will stop at a distance beyond the point D, equal to distance A-B on the launching pad. After stopping, it will start moving back towards the neutral point C and the cycle will be repeated. The roller will oscillate to and fro over the track until the energy will be exhausted by the losses.
If the rigid support at point D will be removed by cutting the glass over flush with the track end, the roller, when reaching this end will drop because of its own weight. It will lose potential energy in the earth’s gravitational field, Eh = mgh, which will be transformed to kinetic energy Th. Thus its kinetic energy beneath the track at point D' will be:
![]()
Now there are two possibilities:
(1) The momentum of the roller beneath the track at point D will be larger than the pulling power of the track and it will fall down from the track.
(2) The momentum of the roller will be smaller than the pulling power of the track and the roller will be held only the plexiglass sheet beneath the track. In section D'-C', it will be accelerated back toward the launching end, arriving to the point B' with kinetic energy:
![]()
If the energy, i.e., the momentum of the roller is sufficient, it will run around the end B' and crash into the launching section where the motion will cease. See Figure 7.
The frictional resistance beneath the track is less than that on the top of the track. The frictional resistance Pc of a rolling cylinder:
Pc Top = k / r .G
depends besides the radius of cylinder r and the friction coefficient k as well as on the weight of cylinder G. Therefore:

where P is component of the magnetic forces, vertical to the track surface.
The system as described is working as a single-sided, double-action permanent magnet linear motor, with interrupted cycle. The picture of the experimental model is Figure 8:
Figure 8

This type of permanent magnet linear motor was built by me in different forms and lengths and with different types of magnets. All are working perfectly, without any trouble. The correct leveling and the correct setting of starting point A are important to its operation. If the gap between point A-B is too small, the roller cannot pick up sufficient energy and will be returned from point D without dropping below the track. The same thing will happen if the track is not leveled correctly.
You can perform many experiments with this simple motor. A very interesting one is the following:
The track will be leveled. The roller after releasing from launching point A will run around the track and crash into the space beneath point B. Now to the track will be given a slight elevation by adjusting the front brackets. The roller must now overcome a small slope. It must always be started from the same distance from point B. To ensure this condition, a piece of small wood or plexiglass bar could be put across the launching pad of the motor at point A and fastened by a piece of masking tape. The roller could be started from this wooden bar, thus always the same distance from B. To ensure this condition, a piece of small wood or plexiglass bar could be put across the launching pad of the rotor at point A and fastened by a piece of masking tape. The roller could be started from this wooden bar, thus always the same distance from B. The elevation will be slightly raised each time. At one point the slope will be too high and the roller will not be able to overcome it. It will be returned from Point D without dropping below track. You will allow the roller to run down until it will overshoot point B. Before it will come to a stop, you will catch it and quickly put it back to the starting mark and release it. The second time the roller will overrun the slope without difficulty and on the bottom surface will return to point B. You can repeat this experiment many times and you will notice that if the roller is launched after running back, it will possess more energy than at the first time. I discovered this fact by experiment action.
The explanation of this seemingly peculiar phenomenon is straightforward. The energy conservation law teaches us that energy could not be lost. At the start, the roller possesses a certain intrinsic magnetic energy. It is inherent with its magnetization. By running over the magnetic track, which has a larger field strength, i.e., higher energy content than the roller, the roller will be further magnetized. It will pick up energy from the track. In engineering language, its working point on the magnetization curve will be steadily changed. A good analogy is the magnetization of a steel bar by rubbing with a permanent magnet.
After removing the roller from the field of the track, the energy gained by induction will not be dissipated instantly. There is a certain relaxation effect. A short time delay is needed until the magnet will return to its quasi-steady magnetization level. Consequently, in a short time the field of the roller, i.e., the flux that it produces, will be stronger than it was before passing the track field. Because the attractive power (Equation 5) depends on the square of the flux density, the second time a larger force will interact with the track field, the acceleration of the roller will be greater. With increased acceleration, the momentum of the roller will be increased also. Thus, the roller will possess more kinetic energy to overrun the slope.
I have no knowledge that this phenomenon was utilized elsewhere before this time. Perhaps you will develop some new applications. Think about it!
This single-sided, double-action permanent magnet motor has perplexed not only ordinary people, but professors of physics and engineers as well. At first glance, it resembles something bordering on the impossible.
This principle and model can serve as a basis for manufacturing dozens of different toys, where unidirectional or bi-directional motion is required. It is simple to build, clean, safe and needs no external power source. It is the first known successful permanent magnet motor.
It is an excellent teaching aid for schools.
Further, it can serve as a carrier for short distances. The distance could be extended by cascading stages as you will learn in Chapter 8.
The Tilted Track Linear Motor
From the point of view of physics, the question now is: can we increase the kinetic energy of the roller so much as to overcome the attractive forces of the track and escape from its field? In the previous chapter, we mentioned that if the kinetic energy of the roller at point D' will be larger than the attractive force of the track, it will drop down from the track. By applying a propelling force, the kinetic energy of the roller is the function of its mass and the square of its velocity. By using modern magnetic materials such as Barium-ferrite or rare-earth magnets, the magnetic forces could be substantially increased. In this case, the mass of the roller could also be increased. The result would be that by using the earth’s gravity as an external force, the roller will run down from the track and out of the magnetic field.
By proper matching of the components, the rotor can gain potential energy which can be used for removing it from the track. To overcome higher elevations, progressively larger accelerations are required in the initial launch to get the roller to the far end of the track. Besides stronger track field, it is necessary to shift the equilibrium point of the track away from the midpoint, toward the far end of the track. Thus, the roller will be accelerated for a longer time. The shifting of the equilibrium point can be done by adding an auxiliary track which is mounted over the far end of the main track (double-sided motor), where deceleration of the roller will take place without this track. See Figure 9.
Figure 9

The added auxiliary track, as is apparent from Figure 9, will shift the equilibrium point by a distance Ds from C1 to C2, toward the track’s far end. The consequence is that the roller can accelerate for a longer time on the main track and its momentum will be greater. Thus it can climb a slope and gain larger potential energy in the earth’s gravitational field, Eh. After rounding the far end of the track at D, it will return to the launching end, rolling along the track’s bottom surface. It will gain speed during its descent and at point B’ will fall from the track and run out from the track field.
This system equipped with an auxiliary track is equivalent to a double-sided, double-action linear motor with an interrupted working cycle.
You can build it in the same manner as the single-sided, single-action motor. The dimensions of the tilted plane motor can be seen in Figure 10.
Figure 10

For the main track, use two soft iron strips of 36 x 1 x 1/4 inch sizes. They will be divided for 46 magnets per 3/4 inch distances. The first hole will be 3/8 inch from end of flats. The magnets in five piece blocks will be sandwiched now with its width parallel with the strips. For a total of 46 blocks per 5 pieces, you will need 230 magnets held in place by means of 3/16 x 2 inch brass screws.
The auxiliary track will be built sandwiching 18 blocks of the same magnets between two soft iron strips 1 x 1/2 x 14 inch lengths. You will need a total of 70 magnets. The polarity of both tracks must be the same as was described by the single-sided motor. When the auxiliary track is positioned over the main track, they must repel each other.
For the base plate you can use a 3/4 inch thick plywood plate 48 x 10 inches in size. The brackets could be built from 3.8 inch thick plexiglass sheet or from plywood. The auxiliary track must be adjustable at both ends, the main track by the far end. You must be able to change the elevation. In positioning, care must be taken to put the auxiliary track’s median exactly parallel with the median of the main track.
As a roller, 3 pieces of cobalt rare-earth magnets of type Crucore T-250 will be used. The rare-earth magnet rings will be pushed through a plexiglass ring machined to size as it is given in Figure 10. The rare earth magnets are very brittle. They must be handled very carefully, otherwise they will break merely by slight forcing through the plexiglass. The ends of the ring could be closed by two plexiglass covers which will be glued in position.
This tilted plane motor can be operated the same way as the single-sided motor. The auxiliary track must be adjusted by trial and error method. You must set it as low as possible, without locking the roller. Remember, the attractive force of the track changes with the square of the distance. A parallel setting with the main track may not necessarily be the best. It must be adjusted until the best acceleration will be obtained.
My motor made to indicated size, is able to overcome a slope one inch per foot. The performance depends on the roller magnets, the smoothness of the surfaces, but mainly from correct adjusting of mutual positions of the tracks.
There is a possibility to use Barium-ferrite rollers from the single-sided motor. The performance will be, of course, substantially changed.
My motor was built and used for roller speed measurements. For this purpose, it was fitted apart with magnetic switches at two inches distance. The time data was transferred to a small computer and evaluated. The track performance was calculated for the acceleration and roller weight and track elevation. For simplifying the measurements, the motor was completed with an automatic roller return mechanism. This consisted of a plexiglass catcher covered with two small pieces of plastic foam to protect the plexiglass from the impact of the falling roller. A motor attached to the catcher rotates it upward so that the roller is deposited on the launch site again. The whole journey up the tilted track and down along the underside is repeated. This motion is perpetual as long as the motor redeposits the roller on the launch site. The photo of the motor is seen in Figure 11:
Figure 11

Now we can pose a logical question: Can one build a device of this sort in which the roller will continually roll around the track without any assistance from an outside agent? Is it possible that once the roller is launched it climbs the tilted track, returns along the underside and then, because of its descent, has sufficient energy to round the bottom side to repeat the cycle?
Hard-core physicist will say a straight no! It was my opinion also, but today I cannot give you a straight answer. This is a toy of force vectors. The motor is a complex energy system where not only the magnetic, but also the inertial and gravitational forces are also involved in the operation. The first and the last are working as a simple exchange mechanism. But in the third, the inertia is form dependent also. This fact and other possibilities regarding the new and rapidly growing science and materials of the permanent magnet industry are urging us to be cautious with our statements. I leave this puzzle up to you. A few years ago my motors, prior to the discovery of ferrite ceramic magnets, belonged to the realm of impossibility. In the next chapter you will earn more about the removing one load from a magnetic track. Here I must warn you, be careful before you make any decision. You must always differentiate between power and energy. The energy must come from somewhere.
Chapter 6
How Can We Remove A Magnetic Load From A Permanent Magnet Track?
If a magnetic motor of the linear sort is to be employed in transporting material, the load probably would have to be removed from the track at some point. There are several ways in which this could be done:
(a) by using
external mechanical force;
(b) by using an external magnetic field;
(c) by using the rotor’s inertia and the earth’s gravitational
forces;
(d) by using electromagnetic forces.
To remove a roller or a load from a permanent magnet field using external mechanical force is straight forward. It needs no further explanation.
Using a permanent magnet field to remove a load from a permanent magnet track is possible only to transfer the load to this, i.e., to the removing field. If we want to remove it without being caught by this external magnetic field, it is necessary to use an additional external force field of non-magnetic origin. This could be the earth’s gravitational field. The principle is depicted in Figure 12. It works as follows:
Figure 12 ~ Removing a rotor from a permanent magnet track by using an auxiliary permanent magnet and the earth’s gravitational field.

T= 1/2 M.v2,
And the force of inertia
Fi = M.v,
Where v is the linear velocity and M mass of the rotor. Suppose this to be Fi > Fm. The rotor will continue in its linear motion decelerated by the force of the magnetic track Fm. When Fi becomes zero, the velocity v of the rotor in non-presence of other forces also becomes zero. Now under the influence of the track forces Fm, the rotor wants to move back toward the track 1. But the rotor 3 is under the influence of the earth’s gravitational force G also. If F > G the track will pull back the rotor. This will fall beneath the track and will be accelerated backwards, as was described in Chapter 4. If we want to remove the rotor from the field of the track, it is evident that Fi > Fm. This is possible only if we raise the rotor velocity v. The velocity is limited by the rotor and track masses, by the interacting magnetic forces, by the friction and eventually by the elevation of the track. Thus, the only possibility is, in these given parameters, to decrease Fm. It would be realized by adding an additional magnetic field Fm, which is polarized in such a way that it will counteract the track forces and result in a magnetic force Fr = Fm = F'm. This could be provided by a properly positioned permanent magnet 2 of required flux density as is shown in Figure 12. The positioning of the auxiliary magnet 2 will be dependent on the desired path of the rotor after removal; See Figure 13.
Figure 13


This method is possible only if the rotor will lose potential energy G.h will increase its kinetic energy. If the track-rotor combination of masses and magnetizations will give the rotor a higher speed, i.e., more kinetic energy, we can remove it from the track field by merely using the earth’s gravitational force. The only criterion is that the magnetic field gradient on the end of the track must be modified in such a way that it will be lower than the normal non-modified field. The simplest physical realization of this method is depicted in Figure 14.
The permanent magnet track will be extended by a soft-iron wedge, which will form an inclined plane. The width of the wedge must be as wide as the track or slightly wider. The length must be calculated in such a way that for the path of the rotor the value of G will be larger than that of the Fm. The magnetic field lines, because of the lower reluctance of the iron, will be more dense in iron than in the air. The flux will be shunted on the track end. Because of the decreasing mass distribution of the wedge, the field gradient of the magnetic forces induced in the iron will be changed in relation of the angle. If the angle is correctly calculated, the rotor driven down by the earth’s gravitational force on the inclined plane will gain kinetic energy, i.e., speed up and roll out from the magnetic field of the track. Here again the potential energy of the rotor G.h will be changed to kinetic energy. The removal from the field will be done at the expense of potential energy.
This is a very simple way to remove a rotor (load) from a permanent magnet track, but it must be emphasized that it will work only if it is allowed to overcome the magnetic forces.
An improved method invented by me for removing a rotor (load) from a permanent magnet track is in Figure 15. By this method part of the magnetic force field of the track is combined with the earth’s gravitational field and by way of a tilting plane and lever action kicks away the rotor from the track field.
Figure 15 ~ Balanced Tilted planet Rotor Remover

Figure 16 ~ Mechanism of the Balanced Tilted Plane Removing

The mechanism is arranged as follows; see Figure 16.
The end of the permanent magnet track 6 is outfitted with a tilting plane 1 from non-magnetic material (plastic, brass, aluminum, etc.). This plane is firmly connected to shaft 3 supported by two brackets 7 in such a way that the holes 2 in the brackets serve as bearings for the said shaft which can turn freely in these bearings.
The shaft 3 is longer than the width of the track and is bent 90 degrees in such a way that it forms a U-shape. Both ends of this shaft are outfitted by counterweights 4. The plane 1 is positioned to the track end in such a way that the shaft 3 is level or slightly lower than the upper surface of the track. The mechanism works as follows, see Figure 17.
Figure 17 ~ Functioning of the Tilted Plane Rotor Remover

The inclined plane 1 in absence of rotor 5 is held by the two counterweights 4 in a horizontal position. Acting on a rotor are Fm the m.m.f. of the track, Fi the inertial force and G the earth’s gravity. The friction forces are neglected. Now the relation of forces are G > Fi > Fm. The rotor driven by the inertial force will enter the tilting plane 1 and will move away from the track end. At the beginning the tilted plane 1 is G < ( G' x C ). The rotor will move further away from the track and come to a distance where ( G + Fm ) > ( G' x l ). Consequently by the lever action, the tilting plane will start to tilt downwards. This movement will be supported by the mmf of the track also which will pull the rotor toward the track end.
The tilting angle and consequently the influence of G on the rotor will increase. It will lose potential energy and gain kinetic energy until the tilting plane and the rotor reach the base supporting plane where the force situation will be changed. The gravitational force G will be eliminated by the counteraction of the supporting base plane. The magnetic force Fm will be weaker than the action of the gravitational force on the two counterweights 4 by lever arm 1 and the angle. Thus, Fm < Gx 1 x cos angle. The counterweights consequently will start to move downwards and by lever action will overcome at the already weakened mmf of the track and the friction forces. The tilting plane by its edge will kick away the rotor from the force field of the magnetic track. The mechanism will work like some height multiplier. The mmf will help to get the rotor out from its range equal to a higher potential energy lost in the earth’s gravitational field, which corresponds to its actual height loss h. It is necessary to remark that the described mechanism is inherently a toy of force vectors, and its parameters must be carefully computed, otherwise it will not work. Shifting the counterweights 4 along the shaft arm 3, i.e., changing the lever arm 1, gives us a certain possibility of adjustments, but not necessarily enough to correct malfunctioning. This experimental mechanism was built and tested by me and found working smoothly. The conditions to assure proper functioning of all the above mechanisms are:
(a) The roller must possess enough kinetic energy to overshoot the track end by such a distance that the gravitational pull on the roller will be higher than the attractive force of the track. The movement on an inclined plane must be considered. The plane angle to the horizontal will substantially influence the forward component of the inertial force.
(b) The mass of the roller (or of any moving load) must be adequate to fulfill conditions in (a).
(c) The potential energy lost by dropping the roller heights must be larger than the kinetic energy that the roller would be able to gain from the magnetic field moving backwards from its momentum position toward the track end. This is a very important rule. You will learn it by experience. It is the key to your success. If a sufficient height loss can be allowed, the removal of the load is no problem.
Another possibility of removing a rotor (load) from a permanent magnet track is using electromagnetic forces. This is the most sophisticated and convenient way. It gives us a means for adjusting the kinetic energy of the rotor by and after removal from the track as required. Although from the point of view of energetics, it is not the most economical and efficient way, its usefulness and advantages cannot be doubted. This method, which I invented, tested and used is as follows, see Figure 18:
Figure 18 ~ Removing the Rotor from a Permanent Magnet Track by Using Electromagnetic Forces

The permanent magnet track 1 described and built according to Figure 1 is outfitted at its end by a magnetic switch 3 and a properly dimensioned electromagnet 4 which could be positioned as a part of the track, or could be placed a certain distance away from the track end, according to the purpose and form of the track. The magnetically operated switch (reed, magnetic pickup, or a Hall-effect switch) 2 and the coil of the electromagnet 4 are connected to a power supply and time 5. It works as follows:
The decelerating field moving rotor 2 at the track end 1 at the moment when it passes the magnetic switch 3, sends out an electric impulse to the power supply-timer 5 and starts it. The triggered timer sends out a current impulse from the power supply, whose amplitude and duration is set exactly by the timer. This current impulse excited the coil of the electromagnet 4. The electromagnetic field of the excited coil counteracts with the field of the track, of the current flow direction is correctly set. This will cause a momentary weakening of the track field. The rotor, driven by inertia, will be able to pass the field. By properly setting the amplitude and duration of the current impulse, we can adjust the mmf acting upon the rotor and set its speed as required.
Adjusting the speed of the roller is sometimes necessary. In motors where the roller is running on a circular track, without speed adjustment, it can roll out o the track and away. The same can happen with the oscillating motor also.
The coil sizes and building steps will be discussed for the referred motors. The driving electronics, schemes and function require a separate Chapter 10.
Conclusions of the rotor removal modes obviously indicate that to introduce a roller onto a track is more easily accomplished than to remove it from the track. About this subject, you cannot find too many references in classic literature, including the patent literature. I am virtually a pioneer in this discipline. My suggestions are not necessarily the only ones, but they proved to be valid and could serve as a starting point for you. Maybe you will be able to find other and better methods for your purposes.
Nevertheless, it must be emphasized that for any practical use, the permanent magnet motors, especially the linear motors, must be individually calculated and specifically designed. The same is true for method of removal. The purpose will dictate the method.
Chapter 7
The Oscillating Permanent Magnet Motor
The self-oscillating induction linear motor is common in industrial uses. Oscillatory motion is widely required by textile, machine-tool and other industries. They are mostly the back-to-back induction motors, or the older type mechanically switched motors, using all of those purely electromagnetic forces. An AC linear induction motor has self-starting properties. My permanent magnet oscillating motor is inherently not self-starting, but it could give more economical performance.
My type of permanent magnet oscillating motor differs from any currently known motors in that it makes use of the direct magnetic pull.
The best analogy of the oscillating principle of these motors is a piece of iron weight, sized between two coil springs. See Figure 19:
Figure 19 ~ Analogy of the Oscillating Motor

If the oscillation of the system depicted in Figure 19 is started by pulling the iron weight 1 to any side and released, the weigh will oscillate with progressive damping. A switched electromagnet 4 will be positioned near the oscillating weight. The electromagnet will be switched to a current source always at the moment when the iron weight approaches the electromagnet. The electromagnet will be energized with a short current impulse and the induced field will pull the iron weight toward the electromagnet. This pulling force will act only for a short time and supply to the oscillating weight a small amount of energy, just enough to replace the losses by material and air resistance. The system will oscillate with sustained amplitude forever, supposing the coil be supplied with electrical energy., this is the basic principle of most electrically excited oscillatory motions.
In my motor the spring is replaced by the magnetic field of a permanent magnet track. See Figure 20.
Figure 20 ~ Principle of Permanent Magnet Oscillating Motor
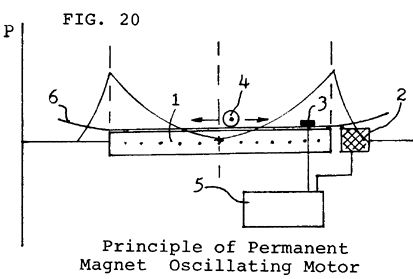
A permanent magnet track 1, similar to those of previously described linear motors, is covered by a plexiglass sheet 6. At one end of the track is placed an electromagnet 2, which is connected to an electronic timer and power supply 5. The time is triggered by a magnetic switch 3, which is operated by the magnetic field of the roller 4. Whenever the roller passes the switch, the magnetic field at the site is altered momentarily. After a short time delay the timer allows direct current to flow through the electromagnet 2 just as the roller approaches the end of the track. The field of the track and the friction of the roller on the track surface both are slowing the roller’s movement at this end. However, the field of the electromagnet, due to the current impulse, pulls the roller toward the electromagnet. The field of the track acts as the springs in the Figure 19. Were this additional field generated temporarily by the electromagnet not present, the roller would merely roll back and forth with dampening amplitude, until it lost all the energy in its motion and would stop. The purpose of the electromagnet is to supply some additional energy on each cycle. The current pulse height and duration is adjustable by the timer. The amount of this current is adjusted so that the energy it supplies the roller matches the loss of energy the roller experiences during the cycle. The result: the roller cycles indefinitely.
You can build this permanent magnet oscillating motor as follows: See Figure 21.
Figure 21

Two soft iron strips 1 x 1/4 cross section will be cut into 12 and 1/2 inch lengths. After sanding, the strips will be marked for 16 holes of 1/16 inch clearance diameter. The first hole is set 3/8 inch from one end of the strips. The holes of one of the strips will be on one side counter-sunk, for heads of flat-head brass screws, 3/16 x 2 inch length. Two pieces of wooden bars, one of 1 x 1 inch and the other 2-1/2 x 1 inch cross-sections, will be cut to 12-1/2 inch lengths. They will be fastened to a 23 x 7 x 3/4 inch plywood base plate, as marked in Figure 21. For the 12-1/2 inch long track, you will use a total of 80 flat ceramic magnets. The magnets will be set up as blocks of 5 pieces and sandwiched between the strips in the same way as was described for the single-sided linear motor. One of the strips will be polarized again as N pole and the other as S pole. The strips with the magnets will be positioned upon the 2-1/1 inch wooden bar and by the brass wood screws fixed it to the 1 x 1 inch bar as depicted in Figure 21, cross-section A-A'.
The electromagnet is of soft iron construction made from two pieces of 2-1/2 x 2 x 1/2 inch thick soft iron flat bars. All sides of the two plates must be sanded and one surface 2-1/2 x 2 inch which will be the top surface, must be polished. The core between the two plates, a 1-1/4 x 3/4 x 1 inch length iron block, must also be sanded and the two ends adjacent to the end plates polished. The contact surfaces of the core on the side plates must be polished also. Remember, any air gap, even the smallest, represents higher resistance for the magnetic flux, i.e., higher reluctance and obviously unnecessary losses. All three pieces of the electromagnet will be screwed together with a 3/8 x 20-3/4 inch long flat head machine screw. Two small holes of 1/6 inch diameter will now be drilled to one of the side plates for passing the magnet wires. The positioning of these holes is seen in Figure 21. One must be right by the core and the other one on the upper corner of the side plate. Before starting to wind, the core must be covered by one layer of electrical plastic tape. The side surfaces which will be in contact with the coil wires, in view in contact with the coil wires, in view of the low voltage used for excitation, must not be covered. The electromagnet is an unusual construction, where the iron material itself will serve as coil form. This has an advantage that the direct contact of coil wires with the iron walls of the magnet, the coil will be better cooled. Although relatively small currents are used, the warming up of the magnet will be moderate also.
The coil of the electromagnet consists of 2000 turns of #28 enameled magnet wires. After finishing the winding, the coil could be covered with one or two layers of electrical plastic tape. Leave enough long lead wires which could be soldered directly to the banana jack terminal after positioning the magnet to the track. The resistance of the finished coil will be about 60 ohms.
The electromagnet must be positioned 1/2 inch from the track end. It could be held in place by means of four small plexiglass bars fastened to the base plate by small brass wood screws. They will form a small cage into which will fit the electromagnet.
After covering the track surface and the electromagnet by a 1/8 inch thick plexiglass sheet, the whole construction will be held firmly together. The ends of the cover glass will be curved slightly upwards by means of two wooden blocks to prevent the eventual runoff of the roller.
On the cover glass about 2-3/8 inch from the electromagnet end of the of the track and about 1/2 inch of side, a magnetic reed switch, such as Radio Shack 275-802 or equivalent, will be positioned, by drilling two small holes for the lead wires of the switch. The lead wires must be soldered to the switch and after pushing through the small holes in the cover glass, the switch will be held in place by twisting the lead wires right below the switch.
A piece of 1/8 inch thick plexiglass with 4 banana jacks will be a convenient supplement to the system. It could be fastened to the base plate, and the lead wires from the coil and magnetic switch to be soldered to the banana jacks. For the roller, the same 3 ring barium-ferrite magnets will be used. The roller must be prepared as it was described for the single sided linear motor.
The Timer-Power supply is described and discussed in Chapter 10. The timers are the same for all my motors, therefore it could be connected to the motor at the corresponding banana jacks. Coil leads to the output posts for the coil, and switch leads to the switch posts, by proper extension leads with banana plugs. After plugging in to a 120 V AC wall receptacle, the timer is ready for turning on. The motor could be set horizontally and started.
You can start it by putting the roller on the glass cover at the end opposite the electromagnet and releasing it. The track will pull it instantly toward it zero force point. After overshooting the zero point the roller will pass the magnetic switch. A short flash on the timer’s indicator light will show that the system is working. The energized electromagnet will pull the roller off from the tack and the cycling will be started.
The timer must be adjusted correctly. It was a built-in 10-turn potentiometer, which controls the pulse length and current in the coil of the electromagnet. If the current --- and consequently the field of the electromagnet --- is too small, then the roller’s motion soon damps out. If the field is too large, the roller is pulled so vigorously by the electromagnet that it shoots off the track.
This type of oscillating permanent magnet motor was constructed and built by me for special purposes, such as for the measuring of the rolling friction of the roller on the track surface. Photo of the motor, see Figure 22.
Figure 22

Obviously the motor in the presented form is not too efficient. The same system for technical applications could be constructed as a pendulum with a small air gap. This will improve the efficiency substantially. Remember, however, the system is not self-starting.
I have not yet contemplated the technical applications of this type of permanent magnet motor.
Chapter 8
The Circular Track Motor, Cascading the Stages
The permanent magnet track could be built in any shape. The roller will always follow the track median and will be held there by magnetic forces. The track could be provided in normal mode when the roller runs on the top surface, or inverted mode when the bottom surface is used as driver and guiding path. Or it could also be a combination of both. On the bottom surface as was discussed in Chapter 4, the friction is less than that on the top surface. The roller is hung up by the magnetic forces. Such an inverted motor will be more efficient than a normal mode which is understandable in view of the reduced friction. If the dimensioning of the magnets and roller is correct, we can keep the friction forces to a minimum value on the inverted motor. As a matter of fact, there the friction forces will be inversely proportional to the weight of the roller, so far as the track forces will be able to keep the roller hanging safely on the track. This arrangement gives to the projectors of high speed railroad some ideas worth thinking about.
Until the present, I have not built such an inverted track. I have studied the performances and characteristics of my normal circular motors only.
This circular motor is the most astonishing and amusing of all my motors. The rollers accelerates by an invisible force, whips around a curved track, is set free once again, and then with a sudden jerk is recaptured by the invisible force. Its path is only about 2/3 of the way over the magnetic track. About 1/3 is running along a free surface where there are no magnets. This is to the casual observer quite mesmerizing and mysterious. Although it is no mystery, if we realize that the empty space, though substantially distant from track ends, is filed with a magnetic force field which in turn influences the roller’s movement. To direct the roller’s path as desired is a matter of arrangement of the magnetic force lines, or, if you like, the forward component of the force field vector. Because the magnetization and weight of the rollers are different, one short part of the track is adjustable to balance these differences.
My first circular motor had a 12 foot long oval shaped track with one 180 degree circular return bend. This track was too long for transporting and handling. I have shortened it piece by piece. My present small track has about one foot diameter and about two feet length. This is a very handy size to transport and demonstrate. If you want to study its function, this size is also sufficient.
Otherwise, there is no limit to the track length. By cascading the stages, you can build any desired length and shape. You can cascade about four permanent magnet sections each ending with an electromagnet for releasing the roller to the next stage. We will discuss the rules and possibilities of cascading further.
Before we discuss the function of a permanent magnet circular motor, here are the parameters and the instructions to build it.
You must start with the building and assembling of the circular section. See Figure 23.
Figure 23

From a 17 x 8-1/2 x 1 inch thick plywood cut out half a circle with a 7 inch radius, labeled 4 in Figure 23. Two strips from a #19 soft iron sheet, one 22 x 1 inch and the other 19 x 1 inch will be divided on its medians for 22 holes. The divisions on the 22 holes. The divisions on the 22 inch long strip will be per 1 inch, whereas on the 19 inch long strip, about 7/8 inch. The 22 inch long strip will be the outer side of the track and serve as flux concentrator, while the 19 inch long strip will be the inner side of the circular track.
You will need a total of 110 pieces of flat permanent magnets for the circular section such as Indox 1-F-1201, 5 per block sandwiched between the two strips. They will be polarized in such a way that the outer strip will be the N pole and the inner strip will be the S pole. Before sandwiching the magnet blocks the strips must be bent to half-circle form. Because inserting the magnetic blocks to these circular strips is difficult, the best way is to start with the two end blocks and a middle block, press the track into the plywood form and fasten it with 3/16 x 2 inch brass wood screws. Inserting the other blocks will be quite easy. The upper side of the track must be exactly in level with the upper face of the plywood support. This arrangement represents the circular section of the motor.
After finishing and checking all magnets for correct polarity, the circular section will be mounted upon a 25 x 18 x ½ inch thick plywood base plate by using four legs 1 x 1 x 1 inch of wood or plexiglass. See Figure 23.
The straight section (labeled 3) consists of 11 blocks if flat magnets, per 5 pieces in each block, which are sandwiched between two soft iron strips, 1 x ¼ x 8-1/2 inch in length. The divisions on strips will be per 7/8 inch for 3/16 inch diameter holes. The section will be supported by a 1 x 1 inch square wooden bar, 8-1/2 inch in length by means of 3/16 x 2 inch brass wood screws. After finishing, it will be provided on both ends with two legs 1 x 1 x 1 inch. One leg by the starting end will be rigidly fixed to the supporting wooden bar, while the second one will hold the section in line with the circular track, serving also as holder for a 1/4 x 2-1/2 inch long brass bolt which will act as a pivot, labeled 10, for turning the section toward or from the middle point of the tracks. This straight section will be mounted about ½ inch distant from the circular section end. The positioning or adjusting of the straight section is necessary for smooth running of the roller, otherwise centrifugal force can turn over and stop it.
The electromagnet, labeled 6, is of the same construction as it was described for the oscillating motor (see Figure 21). The electromagnet will be positioned to the exit end of the circular section, with a gap of about ½ inch. The upper side of the electromagnet will be level with the surface of the circular section. After fastening it in position similarly as was done with the oscillating motor, the whole surface of the motor will be covered by a 1/8 inch thick and 24 x 17 inch size plexiglass sheet. At the opposite end from the permanent magnet track, where there is no support for the cover, it will be propped up by two legs of 1 x 1 x 2 inch and screwed down to the base plate by brass wood screws.
The magnetic switch, such as Radio Shack 49-485, with contacts closed when the magnet engages, will be positioned about 4 inches in from the end of he circular section, behind the electromagnet and about 1/2 inch away from the flux concentrator strip. He best positioning must be found by trial and error setting of the timer, which supplies the current to the coil of the electromagnet, from the field strengths of the track and roller magnets, the speed of the roller passing the switch. For my track the best setting was as is marked in Figure 23. The setting must be done with care. By setting the switch too close to the track, it will be excited from the track field and the contacts will be closed. This inhibits the functioning of the motor. The timer will be blocked in the absence of current pulse, and the roller will not be removed from the track but will be driven back by the magnetic field toward the neutral point.
The roller is the same 3-ring ceramic permanent magnets as for the previous motors. The leads of the magnetic switch and the soil of the electromagnet will be soldered to the small terminal 9 with banana jacks.
Before the motor is connected to the timer, the surface of the cover glass must be well cleaned with some good plastic cleanser.
The cleaned and completed motor will be put on a possible horizontal table. The timer leads will be connected to the terminal, and the timer power supply plugged into a 120 V AC wall socket.
To start the motor, the roller must be put about 3 inches from the starting end of the linear section, upon the glass cover and released. If the roller after the releasing will suddenly turn on its vertical axis, the polarization is wrong. The start must be repeated by putting the roller with the correct polarity upon the glass cover. The released roller will be pulled instantly toward the linear section of the track. It will accelerate onto the track and toward the equilibrium point, and it will continue past the last blacks of magnets in the section. Once it passes the last block, it jumps over the narrow gap between the linear and curved section. There it will be again accelerated and pulled onto the circular track. Again it accelerates toward the equilibrium point of the section, overshoots it, and emerges from the other end of the section. Before it has a chance to be pulled back onto the circular section, it rolls over the electromagnet, triggered by the magnetic switch on the track. The pulse of DC creates a temporary magnetic field that pulls the roller toward the electromagnet, eliminating for a short time the track’s backward forces. The electromagnet works in a figurative sense, like a gate, which opens for releasing the roller from the track field. The pull of the electromagnet also supplies fresh energy t the roller, adjusting its speed to the requested level.
The roller overshoots the electromagnet, whose field vanishes as the pulse supplied it turns off. The roller continues to roll out over the plane of plexiglass cover. The magnetic field of the linear section guides it towards the initial starting point. As it moves closer to the initial linear track, it is accelerated onto the track again. The whole cycle is repeated.
For correct operation of the motor, the timer must be appropriately set and connected to the motor. If the field direction of the electromagnet will be opposite as is required, it will not support the roller’s forward movement, but on the contrary, will retard it. The roller will be shot back onto the circular track. In this case, the leads of magnets must be inverted.
If the timer is not correctly set and the energizing impulse is too long, the roller will gain excess kinetic energy from the field of the electromagnet and its velocity will be too high. The higher centrifugal force in this case will overcome the track’s magnetic forces and the roller will run off the track. If the impulse is too short, the roller will not be released from the track and will run backwards from the magnetic end. The correct adjustments need time and patience. It could be adjusted at the built in ten-turn potentiometer of the timer. The adjusting of the pulse length must be made until the roller runs smoothly from the electromagnetic field and turns toward the starting point. If you have access to a good storage oscilloscope, this can help you very substantially. On the scope display screen you can see and measure the exact length and form of the gating impulse. After correct setting, mark the potentiometer for the future. If the timer was once well adjusted, the difference in case of changing the motor position or roller is only very slight.
It will probably be necessary to adjust the straight section of the track also. This is so if the roller will jerk around its vertical axis before entering the accelerating field or will turn over and stay caught on the end of linear section. If this is the fall, the linear section must be pushed either toward the middle of the track or away from it, until the roller will enter the field smoothly.
There is a further possibility however, the influence of the horizontal setting of the cover glass. If all of your efforts will not succeed and the roller will still run off the cover glass, the corner of the motor, which is opposite to the linear section, must be slightly elevated. The roller will be forced to run up a small slope and its speed will be reduced. Sometimes it helps to slightly prop up the foot of the linear section. They are all only emergency measures; if the timer is properly set, all of these steps will not be necessary.
Eventually, you must learn how to operate this motor without trouble as I did it. If you will, I am sure you will be an expert very soon.
This small motor can drive tow or more rollers also. However, more rollers need a longer track which is obvious. It is really an astonishing spectacle how the roller chase each other. Inevitable in weight and magnetization the rollers differ. As a consequence, one roller will run faster than the other one, and in a short time, will catch the slower one. Here is an open field for your experimentation. This small size portable track will give you many possibilities to study its working principles. The photo of this small circular track motor is in Figure 24.
Figure 24 ~ The Circular Track Motor

The length of the track could be extended by cascading stages. One stage can consist as much as four permanent magnet sections, followed by an electromagnet for gating the roller. The cascading of permanent magnet sections need some explanations. See Figure 25.
Figure 25

You can put two, three or even four sections of permanent magnet tracks together in series. The length of the individual section is determined by the strength of the field produced by the section, i.e., sizes and numbers of magnets in blacks. Another factor is the size and weight of the roller (or if you use different load, the mass of this load). For starting your experiments, you can use linear sections of tracks, as was described for single sided linear motors, and for circular sections as was described above. Each of the stages must be followed by an electromagnet. You can use the same type as was described for the oscillating motor. The magnets could be driven by one timer, which is completed by a sequencer. Each magnet can also be driven by its own timer which is obviously a more expensive solution. The positioning of the magnetic switches is the same as was already described above.
If you want to build a longer track there is no technical limit. The limitations are only your access to proper space and the financial costs. You can build a track of any length, and shape and any desired power.
The length of the track could be extended by cascading stages. One stage can consist of as much as four permanent magnet sections, followed by an electromagnet for gating the roller. The cascading of permanent magnet sections needs some explanation. See Figure 25.
You can put two, three or even four sections of permanent magnet tracks together in series. The length of the individual section is determined by the strength of the field produced by the section, i.e., sizes and numbers of magnets in blocks.
You can put two, three, or even four sections of permanent magnet tracks together in series. The length of the individual section is determined by the strength of the field produced by the section, i.e., sizes and number of magnets in blocks. Another factor is the size and weight of the roller (or if you use different load, the mass of this load). For starting your experiments, you can use linear sections of track, as was described for single sided linear motors, and for circular sections as was described above. Each of the stages must be followed by an electromagnet. You can use the same type as was described for the oscillating motor. The magnets could be driven by one timer, which is completed by a sequencer. Each magnet could be driven by one timer, which is completed by a sequencer. Each magnet can also be driven by its own timer which is obviously a more expensive solution. The positioning of the magnetic switches is the same as was already described above.
The cascading of stages has two main rules:
(1) The gaps between the individual stages must be progressively narrower, see Figure 25. The first gap which is the widest must be followed by a narrower gap. Thus A > B > C > D.
(2) The field intensity of each section must be more or less the same or progressively higher as that of the previous section.
The rules can be explained as follows; see Figure 26:
Figure 26

In gap g between two permanent magnet track sections I and II by examining the force-distance curves, it will be apparent that they form a well A-O-B, with a deep point O. Point O is a neutral force point. The roller arriving at point A must possess sufficient kinetic energy to overrun the force barrier represented by curve A-O. In this gap section it will lose energy. In the section from neutral point to the track II, Point AB it will gain energy again and be accelerated. While running the tracks, the roller suffers energy losses by friction and induction. If the field strength of each section is equal, the roller arrives at each gap possessing less kinetic energy as it had at the previous gap. Consequently it will only be able to override a smaller force barrier as the previous one. By equal field strength of both track sections, this force barrier represented with curve A-O, depends on the gap width, g. Narrower gap means higher neutral point O and shorter slope A-O. After passing the neutral point O the pulling force of the next section, represented by curve O-B, will accelerate the roller toward the neutral point of the next section.
By combination of field intensities and gap width, the roller can be driven over several sections for longer distances. By using one long single section, the driving distance will be much shorter. This is a very important fact. My first track similar to the one stage track in Figure 25 was 12 feet long. Sometimes it is necessary to shift the neutral point slightly to some direction, usually to the forward direction. In addition to the method already discussed, when using double sided motor, there is another possibility, shunting a certain section of the track with a piece of soft iron bar or plate. How shunting influences the positioning of the neutral point is shown in Figure 27.
Figure 27
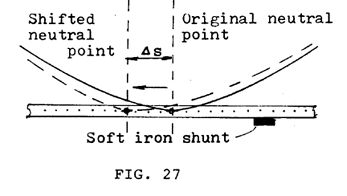
As a rule, shifting the neutral point by shunting a part of track by a soft iron bar, the following is true: The neutral point of the system will always be shifted toward the opposite direction from the shunted half.
This is a point where most inventors make mistakes. They think if a part of the magnetic track is shunted, the rotor or roller will run toward this shunted part; however, the opposite is true. This fact is a straight consequence of the symmetry law? Confusing?
Here must be mentioned yet the possibilities for diminution of rolling friction. The case of an inverted track was already discussed. If we cannot use an inverted track, the question is, does some other way exist to reduce the rolling friction of a roller running one the upper surface of a permanent magnet track?
In Chapter 4 it was mentioned that the rolling friction depends, besides the surface conditions, on the weight of the roller and the magnitude of the vertical component of magnetic forces. The weight of the roller cannot be changed. The magnitude of the vertical component of the magnetic forces which held the roller on track, could be altered by changing the distance of the roller from the track surface. The force changes by the square of distance. The answer is downward curved track, covered by a rigid supporting plate, in our case with a sheet of plexiglass. See Figure 28.
Figure 28

By using a curved track, the vertical component of the track force at end A diminishes. Its numerical value will be lowest if a symmetrical curvature is considered over the neutral point C. After passing the neutral point this component again increases and will have the original value at exit point B. This method was used by some inventors experimenting with permanent magnet tracks, without any explanations or misleading ones, if any.
You now have an overall view of how you can build a circular track motor and at the same some ideas of further possibilities. The modifications and uses have no limit. You can drive a train around a curved track using the principle and rails; or you can use it for driving toy automobiles over a flat table, controlled and driven by invisible forces. You can build a cheap track of any shape by using flexible rubber or plastic magnets. Whatever your decision, there is an open gate for the exploitation of your ingenuity. Could this principle be a part of the transportation of the future? Why not? The principle and theory, supported by successful experiments and models, are given.
Before finishing this chapter, I would like to tell you something about the efficiency of this type of motor.
Direct measuring the efficiency is very difficult. The motor does not perform any other work in a physical sense as in its overcoming of the frictional forces and the losses by induction. They are very substantial if we take into account the small diameter of the roller and the ration of the rolling surface to the weight of the roller. Regarding the strong magnetic field of the track, the vertical component of these forces will be strong also This force must be added to the earth’s gravitational force because both together will give us the weight, which must be considered for friction. The magnetic forces are usually larger than the gravitational pull. Consequently, they will increase the resistance of friction substantially. These parameters give us a dim picture regarding the efficiency.
But we must look at the other parameters. The only external power that we must use is the gating impulse at the end of the stages for removing the roller from the track field. This impulse is always the same magnitude, i.e., the same power, regardless how long the stage is. This fact emphasizes the importance of a possible long stage.
The removing impulse of the described small circular track motor is by 30 V, 0.5 A current and 0.2 second of duration. This gives us a power consumption of about 3 watts. The pulse form is a square wave. That is all the energy that need be supplied the roller to escape from the magnetic field, regardless if the track is two feet or 20 feet long.
It is really astonishing, is it not? No other type of linear motor has similar characteristics. Herein lies hidden the efficiency of my motor.
The Wheel as a Rotor
Studying the circular motor the question is straight forward: Could a wheel be used as a rotor? The circular track could after all be positioned around it as a stator. Will this motor work? What would be the characteristics of such an arrangement?
I am sure that after reading the previous chapters, you realized that a motor employing purely permanent magnets belongs to the dream world of would-be inventors. No working model has until now been heard of. There must always be an external energy source which supplies energy to the motor.
My work was inspired by the work of Japanese engineers of the firm of Kure-Teko. They were already working for some time on a new type of electric motor, a DC motor, with a permanent magnet aided working cycle. They nicknamed the motor as Magnetic Wankel because the motor’s working principles resemble those of a Wankel type rotary engine. This motor design was already discussed in popular magazines. You can find it, for example, in the June issue of the 1970 Popular Science Magazine.
The motor has a permanent magnet stator (track) with a 60° gap and a permanent magnet motor. The magnets are working in a repulsion configuration. The stator is not a circle but a section of a spiral, its radius gradually expanding in the direction of the rotation. Thus the rotor’s eccentric inner curve encloses a wedge shaped space between it and the spinning rotor. The rotor will move toward gradually weakening force field. Now we know the magnetic forced is changing with the square of the distance. Nevertheless, not even the Japanese engineers were able to overcome the well known symmetry law. The change in spacing of the stator magnets around the rotor, although it aids the rotor in its movement, results in no net energy gain from the stator’s permanent magnets. You already know why! Thus, it was necessary to use some external energy source to enable the rotor’s continuous motion. The Japanese engineers put an electromagnet into the 60° gap which is switched at the instant when the rotor is in position where it needs a kick to overcome the stator’s repulsion force and to enter the repulsing field. Scientific explanation of the working principle of this Japanese motor was not yet published. Because the working principle of the Japanese motor was directly tied to my research of permanent magnet aided motion, I have decided to investigate it thoroughly from the standpoint of electrodynamics and energetics.
The questions were:
(1) What is the basis of the Japanese engineers’ claim of high efficiency of the system?
(2) What is the demagnetization rate of the ceramic magnets used working in repulsion mode and in the high centrifugal field of the rotor?
The advantage of pigmy weight of the motor against a comparable conventional made electromotor of the same performance further reducing the expensive copper material costs, was clearly evident to me.
I was convinced that this type of motor is not just an engineer’s plaything. My opinion was supported by my earlier experiments with linear motors.
I had built three experimental models:
(a) The first was a true copy of my circular track motor with a balanced single magnet rotor working in attraction mode, arranged on a plastic wheel as rotor.
(b) The second was a two-magnet rotor arranged on a wheel working in repulsion mode, or in attraction.
(c) The third model was a wheel as rotor equipped with five permanent magnets on its circumference with a moderately eccentric stator. The magnets are working in repulsion mode.
In the models a and b, the driving electronics and the electromagnets used are the same as was described by the circular and oscillating motor.
Model c is equipped with a more sophisticated driver system which is still under investigation. It is far from finished. My goal was pushing down the losses to the minimum. This project is still in progress. This motor is not ready yet for amateur building. Nevertheless, I will give to you a review of what the result is up to now, even though the research is not finished. If you want to be engaged in experimentation with this type of motor, you can use my experiences and this can save you some frustration and money.
My first model needs no detailed description. It is merely a version of my circular track motor. The difference is that the rotor is not running on the track surface, but is fastened on the circumference of a horizontally mounted plastic wheel which can turn around a vertical shaft. The wheel is balanced by a nonmagnetic counterweight (a piece of plastic block). You can reproduce it very easily.
I want to present to you a detailed description of my second model. This is also very easy to build. It is a universal model which can serve for many experiments. The positioning and polarization of the magnets is readily changeable.
You can build it as follows (See Figure 29):
Figure 29

A 1/2 inch thick plexiglass sheet will be cut to 17 x 17 inches, label 2. Two corners will be cut of, as given in Figure 29, and provided with two brackets of 1 x 1 inch plexiglass bar, label 5. Exactly in the middle of sheet and 8-5/8 inch from the bottom of the sheet will be put a marking with a center punch. This marking will be the center of a 7-1/2 inch radius circle. The circle will be divided, starting from the upper middle point, by one inch intervals, both to the right and left hand sides from this middle point. The markings will be drilled for 3/16 inch holes for fastening the stator magnets. A total of 44 holes concentric to the middle of the 7-1/2 inch radius circle, will be drilled.
After completing the drilling a 4 inch diameter hole will be cut in the plate, right in the middle of the circle. The motor shaft will pass through this hole. A 3/4 inch thick 20 x 12 inch plywood sheet will serve as a base plate for the motor, label 4. The rotor wheel is a 3/8 inch thick plexiglass. It will be cut at first by a jig or band saw to rough size and machined to an exact diameter of 13 inches. After machining, a circle of 6-1/8 inch radius will be drawn from the center and divided into one inch intervals, marked and drilled for 3/16 inch holes. This will total 38 holes for fastening the rotor magnets. The center of the wheel will be drilled for a 3/8 inch diameter aluminum rod 6-1/2 inch in length. The ends of the shaft will be turned down to cones and the cones polished. High polish is important to achieve minimum friction. The shaft will turn in its Teflon bearings on its conic ends. That is a common method for diminishing friction. The shaft is held in the wheel center by two plexiglass bushings machined from a piece of 2 inch diameter plexiglass rod. The bushings have 3/8 inch diameter center holes for the shaft and a 6-32 threaded radial hole for a set screw. The bushings will be glued to the wheel from both sides. The teflon bearings will be held by two brackets, label 3, from 3/4 inch thick plexiglass. The bottom ends of brackets are mounted on two 1 x 1 in cross-section plexiglass bars which are glued to the brackets and have two holes for woodscrews for fastening to the base plate. The upper ends of the brackets have a 1/2 inch diameter hole, its center 8-5/8 inch up from the bottom, for carrying the Teflon bearing bolts. The Teflon bearing bolts are machined from a 3/4 inch diameter Teflon rod. The rods are turned down to 1/2 inch diameter in 2 inch lengths and provided by 1/2 x 13 American standard coarse thread. The ends of the Teflon bolts will be machined flat and drilled with a countersink to about 1/4 inch in depth, for receiving the conic shaft ends. The Teflon bolts are held and adjusted in brackets by two 1/2 x 13 size brass nuts. See Detail A in Figure 29.
The driving electromagnet is the same as in Figure 21. It will be fastened exactly at the middle line of the wheel by means of small plexiglass bars. The cage of bars must hold the electromagnet firmly, otherwise it will clink as the motor runs.
The whole assembly will be arranged on the base plate as is indicated in Figure 29 and completed with a small terminal strip, label 10, containing four banana jacks. The leads for the magnetic switch must be cut long enough to make possible proper positioning of the magnetic switch. The marked positioning of this switch is only informational, the correct location must be found experimentally. I will come back to this problem in discussing the operation of the motor.
The setting of the rotor magnets: The rotor will employ two blocks of ceramic magnets, 3 pieces per block. In mounting the blocks to the wheel, it is no matter which pole faces toward the wheel. It could be either the N pole or the S pole. The magnet blocks will be fastened to the wheel by using 3/16 x 1-1/2 inch brass bolts. The only rule for setting of rotor magnets that you must follow is that both of the blocks must be polarized in the same directions. If the one is N pole faced toward the wheel, the second must be faced exactly the same way.
At first you may set only one block and on the opposite side of the wheel put a piece of plastic material of the same weight as the magnet block, as a counterbalance.
And now you must choose between two possibilities: attractive or repulsive working mode? If you decision is to use attractive work mode, the stator magnets must be set in such a way that they will attract the rotor magnets. The stator magnets will be fastened to support with 3/16 inch brass screws also, label 2. Setting the 3 piece magnet blocks you can start from the right hand magnet side. Set up 5 or 6 blocks and lay down the motor with its wheel in horizontal position. Turn the wheel with its magnet toward the stator magnets and observe if there is attraction present. If you cannot achieve attraction, reface the stator magnets. Set all of the blocks the same way. You must again take care not to reverse the polarization of any block because as by the linear motor, only one wrongly polarized block can disturb the course of the symmetry curve and ruin your work.
If you have approximately a quadrant ready with the motor still in horizontal position, turn the rotor magnet about 3 inches away from the stator end and release it. The rotor will be instantly pulled toward the stator and accelerated. Passing the neutral point of the already set stator, it will overshoot the opposite end of the stator and the electromagnet by a certain distance. Mark it and continue with the setting of additional blocks. After setting two or three new blocks, repeat the experiment. Observe that by releasing the rotor magnet always from the same 3 inches distance, when the distance of overshooting will be the greatest? This way you can find the optimal length of your stator.
After finding this optimal length, you can set the second block of rotor magnets after removing the counterbalance and restore the motor and its wheel to vertical position.
Connect the banana jacks to the corresponding binding posts of a timer-power supply the same way as it was described by the circular motor. Plug in the timer to a 120 V AC wall receptacle. Put the magnetic switch at your left hand behind the stator plate, label 2, and hold it there in position. With your right hand now turn the wheel clockwise and watch the signal light of the timer. When you observe a flash at the moment when the rotor magnet approaches the switch, the system is working. In the same time you must electromagnet. If you experience not a pulling, but a pushing impulse, the leads of the electromagnet must be reversed. The magnetic switch must be positioned far out from the field of the electromagnet because if it is too close, the field of he electromagnet could influence the switch and by magnetic feedback, will close and stay closed. In fact, the magnetic switch needs a powerful impulse merely for closing. After it is closed, a relatively weak field can hold it in this position. If this happens, the switch must be replaced. The proper location sometimes requires time and patience. The switch can be fastened by a piece of electric plastic tape into proper position. Now rotate the wheel clockwise with a powerful push. If the wheel started after releasing speeding up with steady flashing of the timer’s signal light, the system is working properly. You can now set the speed of rotation by the 10-turn potentiometer until the motor turns with its highest speed.
You must try to relocate the switch and change the timer’s setting until yu find optimal working conditions.
If you perceive friction while turning the wheel, you must adjust the bearing bolts and check to see if some of the magnets are not loose and rubbing the rotor of the stator. Although the experts say that Teflon needs no lubricant, I can recommend the use of a good silicon oil. Please use a few drops. It will substantially reduce the friction of the shaft in Teflon bearings. If silicon oil is not available, some drops of Mobil-One will do. The lowest possible friction is essential for the correct operation of the motor.
You can modify the positioning of the stator or rotor magnets at will. You can shift the ends, change the length, change the number of magnets in the blocks, etc. See which mode of operation is better: attraction or repulsion? If you change the mode of operation, do not forget changing the current flow direction in the electromagnet. When the track is set for attraction, the electromagnet must be set for attraction also. If you choose repulsion mode, the electromagnet must be set for repulsion.
Two important things to remember: these systems are inherently not self-starting systems, and the inertial momentum of the wheel plays a substantial part in the working principle. The comparable Japanese motor must be started by using a regular starter motor. Obviously the motor has better efficiency with a higher RPM. In the described motor you will probably be limited by the mechanical properties of the magnetic switch. The upper limit is normally in the thousands of RPM. At average, that is about 1000 RPM, the mini-switch will work perfectly. For higher RPM or for multiple pole rotor solid state switch, the so-called Hall Effect switch must be used.
This motor is of a foolproof construction. It has a negative torque-current characteristic. It can run with constant RPM only of the load and the torque of the motor are in equilibrium. Under a higher load the motor will slowly wind down and stall. If it is not running it takes no current. Thus by overloading it cannot overheat and burn. Of course, it must be mechanically started.
What is the performance of this motor? If everything is correctly made and set, the motor will take at no load condition about 18-22 watts. If it will be driven by higher energy input, it must be loaded by some braking equipment, such as the Pony-brake, which can also be used at the same time for measuring the output power. Do not expect high efficiency. The air resistance, the so-called ventilation losses, and the losses by induction will decrease the efficiency.
Probably you will propound the question, will the motor work without the stator magnets? Of course it will, but with changed performance. For the first instant it will change to the better. Therefore, what is the importance of this stator if instead of improving of this stator if instead of improving it worsens the performance. Here we come to the root of the matter. At a low RPM the stator will work as a brake. But if its length and neutral point setting is correct and the neutral and magnetic mass of the rotor is properly chosen at a higher RPM it will support the rotation as dies the Japanese motor. The question is, from where comes this energy? It is taken from the spin energy of the unpaired electrons in magnets. To explain this energy exchange mechanism is not a simple matter. This belongs to the relativistic and quantum physics and certainly goes beyond the concepts and purposes of this booklet. If you are interested, you can find some explanations by studying Dirac’s concept of exchange energy and the inter-atomic alignment of spins. The topic will be subject of further investigation.
For easier understanding, the stator can push r pull the rotor in a section as much as 300° . For removing, if the working mode is attractive, or for kicking to the field, if the working mode is repulsive, only a short impulse is necessary. Remember what was said by cascading the permanent magnet track stages. The main losses of conventional electric motors are heat losses, which are composed of coil losses by Joule’s heat, I^2R, and by hysteresis losses in ferromagnetic materials. In pulsed systems these losses have a minimal value. The electromagnets come in small sizes, what is obvious is that a coil of the same field strength could be dimensioned far smaller with a pulsed current than for a steady current. If an electromagnet coil is rated for steady current of one ampere, it can carry a pulse current of 100 A, provided the mark to space ratio is 1:104. The I2R loss in the coil will be the same in both cases, but during the pulse the magnetic field will be 1000 times as great. This is a significant advantage of pulsed systems. The magnetization of the rotor magnet is changing steadily during the work cycle. It is working under recoil conditions. It will possess a higher magnetization rate upon entering the field of the electromagnet that by entering the stator field. Remember the experiment described with single-sided double action linear motor. Here there is no demagnetization effect as by conventional permanent magnet motors. On the contrary, here there is a magnetization effect, which renews the original field strength of the rotor magnets. The magnetic induction depends besides other factors, also from the mutual speed of magnetized and magnetizing objects. This is also a factor of the working principle. Make no mistake, all of these factors can only improve the efficiency of the motor, which can approach a ratio of one, but can never surpass it. Higher efficiency than one means that you can get more energy out than you put in, which is impossible because of the energy conservation law. Such a machine would be a perpetual mobile which is nonsense.
It is something else if we can use energy that is free, but it must come from somewhere.
My latest model is a motor where the losses are kept at a very low level. Of course, for not so low what is possible by contemporary technics. Nevertheless, at a very low friction suspension with a small but very efficiently pulsed electromagnet where the ferromagnetic material is only 1-1/2 cm3 in volume and with a sophisticated electronics system, my motor needs an unbelievably low 80 milliwatts power to sustain a 1400 RPM. The average electrical noise, mostly from 60 cycle power lines, is sometimes and at some locations as high as 2 watts. This is all the energy that my latest motor needs. It can pick it up and use it. Of course, it will not generate power, but will perform gallantly under no load conditions. It is a very fascinating demonstration and teaching aid.
This motor is in the very early stage of development with many properties at present not quite clear. Further investigation is called for. After finishing my research work, it will be published in a separate book.
Have I proposed perpetual motion? Of course not. But today I am able to build a motor which can run for centuries to the delight of its owners. The service will not bother me. It could be the business of my very distant descendants. The possibilities are here.
As a summary: The described permanent magnet motors have the following curiosities:
(1) The efficiency of the system could be very high, approaching in some cases one.
(2) They could be built of any material, even from wood.
(3) The only iron material used is a small piece of electromagnet core, which can be replaced by a ferrite core also.
What do you think, are these motors worth further development? Think about it!
The photo of the latest model is shown in Figure 30.
Figure 30 ~ The Wheel as Rotor

Chapter 10
Electronic Circuits for Driving and Timing
All of the described motors which use an electromagnet for gating the rotor (roller), need a driver circuit which just as the rotor sensing switch closes, sends out a current impulse of precise amplitude and duration to energize the electromagnet. He correct functioning of the driver circuit is essential. If the current pulse in the electromagnet is too short, the roller will be returned from the track and toward the neutral point of the track. If it will be too long, the roller’s speed will be too high and will run off the track.
The duty of the timer is to set the length and the height of the driving pulse as is necessary, depending on the parameters of track and roller. My design is a universal timer which fits to all motors and its construction is as simple as possible. If you are not electronically minded, some of your radio-amateur friends can help you. The performance of the timer-power supply may exceed the normally required power that the motor needs for its work, but the reserve it has is always advantageous if somebody want so to build some device other than as described. Besides the said properties, I also emphasize the ease of construction.
If you are qualified in electronics, you can alter the following simple scheme and build timers and drivers according to your imagination and needs. As an alternate possibility, you can use mechanical switching devices as will be further discussed.
The timer-power supply of my construction is divided into two parts: The timer itself with the power switching transistor and the power supply which provides the necessary voltages and current for the timer and its switching part. The schematic diagram of the timer-power supply is in Figure 31. The parts list is below:
Figure 31 ~ Power-Supply Timer Circuitry

Parts List
R1 = 1 M,
1/4 W Resistor
R2 = 10 M, 1/4 W Resistor
R3 = 1 K, 1/2 W Resistor
R4 = 220 Ohm 1/2 W Resistor
R5 = 68 Ohm 1/2 W Resistor
R6 = 100 K, 10-turn potentiometer
RL = 15 K 1/2 W Resistor
C1 = 1000
pF, 50 V DC Capacitor
C2 = 0.01 uF, 50 V DC Capacitor
C3 = 0.01 uF, 50 V DC Capacitor
C4 = 1 uF, 50 V DC Capacitor
C5 = 4700 uF, 35 V DC Capacitor
C6 = 4700 uF, 35 V DC Capacitor
C7 = 0.33 uF or 0.22 uF, 250 V Capacitor
C8 = 0.1 uF, 250 V Capacitor
Q1 = 0.1 uF 250 V Capacitor
IC1 = 555
Timer
IC2 = 50 V PIV 6 A Full Wave Bridge Rectifier
IC3 = 50 V PIV 1 A Full Wave Bridge Rectifier
D1 = 400 PIV 3 A Silicon Diode
LED = Light Emitting Diode
IC4 = 7815, 15 V Voltage Regulator
M.S. = Magnetic Mini Reed Switch
SW1 = Standard Toggle Switch
F1 = Clip-in Fuse holder
Fuse = 1.5 A S.B.
T1 = Power Transformer 120-36 VCT 1A
Miscellaneous: PC Board, Wire, Banana Jacks, Screws, Metal Cabinet.
The timer part of the driver is a mechanically triggered monostable, employing a 555 IC time. Figure 31, upper diagram. The 555 timer is triggered by a magnetic mini reed switch M.S. Prior to the actuation of the switch by the magnetic field of the passing roller, the capacitor C4 is charged to 15 V through R6. The potentiometer R6 is a 10-turn type, its setting determines the output pulse width. By the closing of the magnetic switch M.S., C4 discharges rapidly through R3, creating a short negative spike. The resultant negative spike is then passed through C1 to the 555 as a trigger pulse. This fires the monostable, generating an output pulse of width T = 1.1 x R6 x C4. Upon release of magnetic switch M.S., C4 recharges to +15 V, and the circuit awaits the next switch actuation.
The time constant and circuit arrangement of the trigger circuitry are chosen for a single trigger and output pulse, for each switch closing only. Furthermore, the circuit will not trigger on switch release and will produce only one pulse regardless of how long M.S. is closed. The circuitry will also retrigger as fast as M.S. can reactivate.
The output pulse through voltage divider R4-R5 is passed to a power transistor Q1 which functions as a booster amplifier. Transistor Q1 will be on when the timer output is high. The 2N6055 NPN Darlington transistor can handle up to 5 Amps current and 60 V. With this circuit the timers positive voltage V should be +15 V to ensure adequate base drive for Q1. The coil of the electromagnet L1 is directly connected to the collector circuit of Q1 and to the +36 V power supply. Because of the inductive load L1, the circuit uses a reverse clamping diode D1 to protect the circuit. Parallel with coil L1 is connected an LED of green color for indicating the action of the circuit. LED flashes when the coil L1 is energized. He resistor RL keeps the current of the diode at a permissible level.
The power supply employs a transformer T1 whose secondary current is rectified by heavy-duty bridge IC2 and filtered by capacitors C5-C6 connected in series. This is necessary because the no-load voltage of the 36 V power supply will be higher than 35 V which is the operating voltage of a single capacitor.
T1 is center tapped and from the center is taken the current of about 17.5 V, rectified bvy full bridge rectifier IC2, and stabilized to +15 V for timer circuitry by IC4.
For building both circuits, two 4-1/2 x 2-1/4 inch perforated boards are used. The transformer and both filter capacitors C5-C6 are directly mounted on the base plate of the cabinet. The 10-turn potentiometer is a printed circuit type for screwdriver setting. It is accessible through a 1/4 inch hole in the left side of the cabinet cover. The picture of the Timer-power supply as assembled is Figure 32.
Figure 32 ~ Assembled Timer-Power Supply

For checking the function of the finished circuits, the magnetic M.S., could be replaced by a pushbutton switch NO of any type. After connecting the Timer to the 120 V AC power line, the line switch SW1 in ON position, by pushing the push-button switch, which replaces M.S., a short flash of LED must be observed.
This is the signal that the circuitry is working. A storage oscilloscope will be connected to the banana jacks for the coil output. The scope trigger mode will be set to single shot and store. By pushing the pushbutton switch, the driving pulse will trigger the scope and the pulse form and width will be stored on the scope’s display tube and can be easily measured. Starting with the lowest resistance value of the 10-turn pot R6 and the corresponding shortest pulse duration, it is possible to plot the timer characteristics: pot meter turns vs pulse length, for the entire 1-turn range. This will be a very valuable help for further experiments.
How to operate the Timer-Power supply in connection with the proper motor was discussed by the description of the motors.
The discussed driver circuitry is sturdy and if properly built, reliable. It needs no special operating instructions.
The Timer-Power supply is not the only possibility for driving the plastic wheel motor. If you are unpretentious and do not require accurate measurements, you can build more simple driving systems for the wheel. Some alternate drivers are shown in Figure 33.
A simple relay-type driver consists of a 35 V DC power supply (battery or any other type) able to deliver about 1 A current, and a DC relay, which has a coil rated about 12 V or less. The current of the coil could be adjusted by a proper resistor R. The relay will be directly driven by the magnetic switch M.S. The parts are connected according to the schematic in Figure 33. This type of driver will give you a square wave pulse, whose length will be controlled by the RPM of the motor. With regard to the relay, it cannot be used for higher RPM. To connect the driver to the coil of the electromagnet the rules are the same as discussed earlier. It must be realized that this type of driver will not be too quiet and will have only a short lifetime.
The switching contacts of the relay, because of the heavy sparking, will be burnt out in a short time. It is possible to reduce the sparking by connecting from an automobile ignition system parallel with the contacts. This can extend the lifetime of the contacts.
The improvement of efficiency of relay type driving system can be achieved by connecting the electromagnet and a capacitor as a parallel-resonant circuit. The resonance must be calculated for a chosen RPM, therefore repetitive frequency of driving pulses respective its higher harmonics. The schematic of a tuned driver is in Figure 33. You can also try a series resonant circuit. In both cases, when changing the capacitors, the RPM of the motor must be noted. The procedure is similar to that of the AC induction motors for improving the power factor.
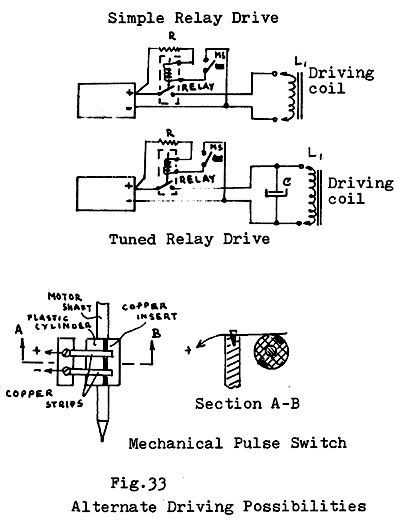
Another simple arrangement for pulsed driving is a mechanical switch driven by the motor. See Figure 33. They are really two sweep-contacts driven by the motor shaft. The shaft of the motor will be provided by a plastic cylinder about one inch long and one inch diameter. The cylinder consists of one, two, or as many copper stripes in a groove as the number of rotor magnet blocks. The surface of the stripes must be flush with the cylinder surface to ensure a smooth vibrationless operation. They must be firmly glued to the cylinder body. The width of the stripes determines the pulse width. The slipping contact strips are held on a bracket from plastics. The bracket length is adjusted to the shaft height. The fastening of the plastic cylinder position is provided by a small set-screw. This makes it possible to position the cylinder for the best ROM.
If you built an electronic Timer-Power supply, I recommend that you build a simple relay type also. With the two drivers it is possible to perform a very interesting experiment, as follows:
First, you may hook up the electronic driver to the motor as was previously discussed. Between the coil of the electromagnet and output jacks of the driver connect a watt-meter. Start the motor and at the maximum RPM measure the input power. Mark it and now change the electronic driver to the relay type system without any capacitor. The watt-meter must be connected again for measuring the input power. At the same RPM as before with the electronic driver, measure the input power again. Compare it with the previous measurement.
You will be astonished! The measured power input, without otherwise changing the mechanical conditions of the motor, such as RPM and friction, will be about 1/3 as was measured with the electronic timer. Please don’t misunderstand, you must measure in both cases the input power from drivers to the coil of the electromagnet of the motor, not to the power supplies. By using the relay driver, the contacts must be sparking intensively. Now bypass the contacts of the relay with a high voltage capacitor as above. The sparking will diminish. Measure again the input power to the coil. The result will be almost the same as was measured using the electronic driver.
What happens here? At the present time I have no satisfactory explanation. This astonishing phenomenon needs further investigation, by using tighter controls than those available to me. What the connection between the sparks and energy input is, we don’t know yet.
You can find many other ways of driving, using transistors as drivers, thyristors, or for very small performances, Hall switches or direct magnetic reed switches. It all depends on your motor sizes.
The efficiency is a function of the mass size and load, i.e., friction, and from the construction. There is no limit to asserting your imagination. The basic paths I have paved for you!
Chapter 11
Possible Energy Resources
My previously described motors are not perpetual motion machines. They need an external energy source. This source can be supplied: (1) from power lines, 120 or 220 V AC; (2) from any type of battery, dry cells or rechargeable, which can supply the requested voltage and current; (3) from solar cells; (4) from thermal energy converter; or (5) in some areas, from the surrounding by induction (motors with minimal mechanical losses).
Energy from the power line is obvious. It must be transformed to required voltage, rectified from AC to DC, and processed by the driver circuitry. It is what any power supply can do.
Using batteries is the cleanest but also the most expensive way. The lifetime of the normal dry cell is short. They need frequent replacement. If you will use batteries, the power supply part of the timer will be unnecessary. You can connect the batteries directly to the +15 V (+12 V will do it also), and 36 V terminals of the timer. By changing the wire sizes and ampere turns of the coil of the electromagnet, it is possible to use voltage lower than 36 V. The coil must be dimensioned in accordance with the voltage and power demand of your motor.
By a scheduled longer experimentation, rechargeable batteries are not a bad solution, and in soeminstances are more economical.
For accurate measurements, batteries are inferior as a power line eliminator but obviously safer.
The solar cell represents a free energy source. A small solar power supply with storage batteries can realize your dream toward a free energy source, and can drive your motor permanently.
In the planning of a solar power supply, the factor of power demand is important. It must be capable of delivering the peak current demand. If you want to build your motor for example for driving a fan for uninterrupted day and night operation, the solar cells must be dimensioned for twice the motor power demand. Thus, by day it will drive the motor and charge the storage system. At night, however, the motor will use the energy stored in the batteries.
The solar power supply consists of a solar panel composed of individual solar cells, the charging circuitry and the storage batteries. Te schematic of a simple system is in Figure 34.
Figure 34 ~ A Simple Solar Power Supply

The solar panel supplies energy to the motor M through the diode D1. This diode is an important part of the charging system. It is possible, because of full charge or low illumination, that the battery voltage would exceed the charging source voltage. Without the diode in the circuit, the battery would then discharge into the solar source. This is avoided because in the event of high battery voltage, the diode is reverse biased, the anode becoming more negative than the cathode. The diode will block the reverse current.
The common characteristics of my motors are that if they are not running, they represent an open circuit for the power supply. They take no current from the supply which is thus automatically disconnected. This type of motor is foolproof because in the light of its negative current-torque characteristics, it cannot bur out. If it is overloaded it will simply stall and the power supply is automatically disconnected. When not running there is no current flow in the coil of the driving magnet. This is true for relay type drivers also.
The silicon solar cells come in a variety of shapes and sizes. They could be assembled and connected in various series and parallel combinations to obtain desired voltage and current capability. Cells as large as 4 inch diameter are available capable of delivering 2 amps at 0.42 V. Hence, quite a large group of cells must be wired in series to obtain a reasonable output voltage. Cells in parallel increase the current capability. I might suggest that after assembling the cells, you should cover them with a sheet of glass. The life of the cells will be substantially extended without substantial changes in performance. The cleaning of the panel will be easier also.
A solar panel could be built into the base plate of the motor. If it will be covered by an opaque sheet of white plastic, the performance of the cells will be decreased only about 20%, but the cells will be concealed from the viewer who will admire your creation, working seemingly without any energy supply.
If you want to build a solar power supply of any kind, consult the bibliography at the end of this booklet. There you will find excellent sources of information.
Some manufacturers are producing today watches and clocks which can run years without any care of energy supply. They are using thermal energy which is supplied by the body heat of the wearer or in the case of clocks, the temperature differences inside and outside of the building. This too is a good idea for supplying free energy to your motor.
It is possible to convert thermal energy directly into electrical energy by means of thermocouples, with no machinery and nonmoving parts. A thermocouple is made by joining alternate lengths of electrical conductors or semi-conductors of different kinds, and heating one junction and cooling the other. This produces a potential difference and generates current, i.e., electric energy. Thermocouples of unlike metals have voltages of 20-60 microvolts per degree, and semiconductors may have voltages of 1 mv per degree. The thermocouples are arranged in series and parallel in so-called thermo-electric modules. The modules can be used thermoelectric generators. Modules are built in all possible sizes and performances, by many manufacturers and laboratories. The sources are listed at the end of this book.
In this section I would like to describe an exotic and slightly known thermal energy converter which eventually could be a candidate for free energy. This is an energy converter I discovered some years ago using water. It is probably the simplest generator of electricity in the world. For building it you need a piece of rag, water and two electrodes for collecting the electricity. The schematic of the Water Energy Converter is in Figure 35. The direct energy converter using water works as follows:
When water diffuses through a porous media and evaporates from the surface, the material cools. If a metal electrode is attached to the end undergoing evaporation, a thermal gradient occurs between the electrode and water. Because the water and the electrode are dissimilar conductors, the thermal gradient creates a Seebeck emf. When the system absorbs energy from the surrounding by means of convection or radiation heat transfer, the energy is converted to electric current.
Figure 35 ~ Scheme of the Water Energy Converter

The produced is not too great. The converter is more of a curiosity. The value of the current and voltage is dependent on the area of the absorbing surface, but the energy is abslyutely free. The rag electricity generator is, and probably will be, the world’s cheapest thermal energy converter for a long time. The performance could be substantially increased by using as porous material a good lamp wick fabric which prepared before using by chlorophyll extract. If you are interested, write me please. I will be delighted to send you at nominal cost more detailed information with my theoretical explanation.
The picture of a 3-stage water energy converter is in Figure 36.
Figure 36 ~ Water Energy Converter

Another energy source which is also free is the omnipresent electromagnetic radiation produced mainly by the 60 Hz house current power lines. Its intensity is dependent on the location and it has a value of from a few microwatts to as much as 3-5 watts, if in the vicinity of high voltage power lines. The phenomenon is well known to the builder and maintenance men of MOSFET and CMOS devices. It is the curse of the CMOS input burglar alarms and of any fine current measurement devices in the range of millivolt potentials.
The construction of good electronics equipment to pick up these powers is not an easy task. It is absolutely not a hobby job. It needs sophisticated electronic measuring equipment and not easy to obtain parts such as tunnel diodes, extremely small forward resistance rectifiers, etc.
I have such a circuitry in my latest model motor which is currently under investigation. Sometimes it performs well and sometimes not. It depends on the location of the motor. It is tuned to the 60 Hz radiation which has a very limited range. The motor was running continuously in my laboratory for 3 months during the summer. Once in the fall it stalled. It was necessary to charge the system directly from a power line after it’s stalling. It would be a help of the pickup coil (antenna) were directional and aimed toward the direction of most intensive radiation. Unfortunately, my antenna is built in at the base plate of the motor and therefore could not be rotated. If you want to experiment with similar systems, think twice. You must realize that such an experimentation needs a lot of knowledge of electronics and radio technics. It is a very time-consuming and costly equipment, and the results are always uncertain.
Furthermore, you must realize that both of my latest energy sources are intended exclusively for experimentation but no way for power production. You should be happy if you can overcome the frictional and other losses in your motor.
There are many other more or less esoteric energy sources which are probably available in certain ranges, considering the fact that the pulsed motors need less energy than the conventional permanent magnet direct current motors. Such energy sources are, for example, the atmospheric electricity and the radiant energy from the outer space. They are truly neglected by the scientific establishment which does not mean that they are not worth investigating. There are again no limits to your imagination.
Conclusions
I come to the end of my book, wherein is presented part of my work aimed toward the investigation of permanent magnet generated and aided motions. The described motors are byproducts of this research. They were built and served for proof of the theoretical speculations.
With this publication, my work is far from finished. My intention is to continue in investigation, especially is to continue in investigation, especially the interactions of rotation generated inertial fields, respective the changing of momentum of inertia if such a thing is present. According to the linear vector theory of inertial fields, it may be possible.
I am working alone without any funding or financial help, using my free time and my own financial resources. Experimentation with permanent magnet devices is not quite a cheap business. It calls for a lot of sacrifice.
Despite these facts, I do not consider my achievements as my sole property. They belong to all mankind! My goal was to arouse the interest of as many people as possible, to start a new engineering discipline, the perma-energetics.
The future belongs to the efficient. Nobody can change this trend of development! What seems to be today impossible, could tomorrow be a reality. History teaches us that, no matter whether somebody likes it or not!
If my present work can only slightly improve the energy situation of the world and at the same time inspire others to work, my endeavor was not wasted! This was the purpose of my present publication and the publication of Prof. Dr Jearl Walker in the 1982 March issue of the Scientific American.
You can start where I have finished. Nevertheless I must warn you, if you intend to patent something of the motors described in this book, it will hardly be possible. Probably you will not fulfill the requirement of the prior art. But if you will build something new by using the principles presented in your way to get a patent. You will be able to patent your new ideas.
Finally I would like to clear up the question of responsibilities. I give you no warranty that your work will succeed. Your work is solely at your own risk. I take no responsibility, in any respect, for failure or accident that you can meet with my motors. I do not guarantee you a success. This depends on you.
My motors were demonstrated to many experts, and publicly as well, under the sponsorship of the Cleveland State University Chapter of the prestigious American Society of Mechanical Engineers.
Bibliography
James R. Ireland: Ceramic Permanent Magnet Motors; McGraw Hill, NY, 1968
Parker and Studders: Permanent Magnets and Their Application; Wiley and Sons, 1962.
D. Hadfield: Permanent Magnets and Magnetism; Wiley and Sons, 1962
A. Schure: Magnetism and Electromagnetism; Rider Publ., Inc, NY, 1959
Herbert Woodson and James Welcher: Electromechanical Dynamics (Part I / II); Wiley and Sons, NY 1968
G.R. Polgreen: New Applications of Modern Magnets; Macdonald, London, 1966
E. R. Laithwaite: Propulsion Without Wheels; English Univ. Press, London, 1966
E. Laithwaite: Induction Machines for Special Purposes; Chem. Publ. Co., Inc., NY 1966
Fenimore Bradley: Materials for Magnetic Functions; Hayden Book Co., NY 1971
D.S. Parasuis: Magnetism; Harper and Brothers, NY, 1961.
R.R. Birss: Electric and Magnetic Forces; American Elsevier Publ. Co., NY 1968.
Malcolm McCraig: Permanent Magnets in Theory and Practice
Forest Mims: Engineers Notebook; Radio Shack
Rudolf F. Graf: Dictionary of Electronics; Radio Shack, 1974
Edward M. Noll: Wind/Solar Energy; Howard Sams and Co., Inc., Indianapolis.
Farrington Daniels: Direct Use of the Suns Energy; Ballantine Books.
Jearl Waler: Motors in Which Magnets Attract Other Magnets in Apparent Perpetual Motion; Scientific American, March 1982