Henry
WALLACE
Kinemassic Force Field
Counter-rotating masses of half-integral spin nuclei material (i.e., copper, zinc, lead, tin, nickel, vanadium, arsenic, gallium, &c) generate a "kinemassic force field" that can be used to work against ambient gravity. Wallace received 3 patents for his discovery.
New
Scientist ( 14 February 1980 ) : "Anti-Gravity Not
So Crazy After All"
Henry W. Wallace : "Concerning Mass
Dynamic Interactions" ( 31 January 1983 )
US Patent # 3,626,605 : Method &
Apparatus for Generating a Secondary Gravitational Force
Field
US Patent # 3,626,606 : Method &
Apparatus for Generating a Dynamic Force Field
US Patent # 3,823,570 : Heat Pump
R. Stirniman
: The Wallace Inventions ( PDF )
"Antigravity Not So Crazy After All"
It is now nearly 10 years since Henry Wallace was granted a pair of US Patents (# 3,636,605 and 606) on what was initially written off as a crazy science fiction notion --- a machine to generate an anti-gravity field. But in the interim, Professor Eric Laithwaite of Imperial College, London, has achieved both fame and notoriety by arriving independently at a similar theory.
According to Wallace’s patents, bodies made of carefully chosen materials generate an energy field when placed in rapid relative motion. This field is not electromagnetic and was christened by the inventor as a Kinemassic Forcefield. If this kinemassic field is made to undulate, a secondary gravitational field is produced which can neutralize gravity.
In one kinemassic machine a pair of wheels of brass alloy, like gyroscopes, are mounted in close-fitting air gaps between massive structural supports formed from steel. The wheels are driven to a high speed of rotation by jets of compressed air or nitrogen. The inventor claims that, at speeds of about 20,000 rpm, polarization of the spin nuclei of the alloyed metal occurs. If one wheel is balanced on a knife edge, it will start to oscillate under the influence of the other. If the spinning wheels are rotated abut another axis, a secondary gravitational field is created which reduces the wheels’ weight. If a sufficiently strong field is created, it can generate localized areas of gravitational shielding and thus provide an effective propulsion force.
Although the Wallace patents were initially ignored as cranky, observers believe that his invention is now under serious but secret investigation by the military authorities in the USA. The military may now regret that the patents have already been granted and so are available for anyone to read.
"Concerning Mass Dynamic Interactions"
Henry
W. Wallace
(31 January 1983)
Based on the assumption of your interest, following are descriptive explanations of two of the many facets of the kinemassic field force (KF) energy: one micro, the second, macro in form. Acquainting you with just the first (micro) of these facets, I believe, will establish the reality of the KF to you although other facets --- in addition to these two --- convincingly exist not the least of which are the quantitative test data associated with, for example, the KF permeability experiments.
Einstein believed that a force field could be generated from the mass dynamic interaction of bodies in relative motion. Quoting from the Encyclopedia Britannica (15th Ed., Macropedia, Vol. 8, p. 289): "Field theories of gravity, Einstein’s general relativity being an important example, also predict specific corrections to the Newtonian force law, the corrections being of two basic forms: (1) When matter is in motion, additional gravitational fields (analogous to the magnetic fields produced by moving electric charges) are produced; also, moving bodies interact with gravitational fields in a motion-dependent way...". Sometime after Einstein’s death, this predicted field --- a mathematical expression --- was posthumously termed "protational". Einstein was said to have been distressed that, experimentally, this predicted force field energy apparently could never be realized --- and therefore verified --- since calculations indicated that the maximum mass densities of available hardware, needed for "matter in motion" (mass dynamic interactions), would hypothetically generate field forces so infinitesimal as to be many orders of magnitude below measurable levels. Platinum (Pt) --- with a density of p = 21.45 gm/cm3 --- was thought to be the most viable hardware candidate.
The KF reasoning is quite clearly believed to have stolen a march upon the existing field theories of gravity; a march of utmost importance regarding concepts of experimental hardware. This preceding statement especially applies to the maximal attainable density needed for the measurable interaction of "matter in motion"; the neutron possesses, for example, a density of close to 3.5 x 10^14 gm/cm^3.
Quoting again from the Ency. Brit. (Special Suppl. 1976 Brit. Book of the Year, p. 62) as regards awarding of the 1975 Nobel Prizes, L. James Rainwater, one of three Nobel laureates for Physics that year, wrote a paper associated therewith of which the following excerpt applies: "...observed that the greater potion of nuclear particles form an inner nucleus while other particles, which are all in constant motion at tremendous velocities, affect the other set of particles...". For reasoning which is not included here but which is set forth in US Patents # 3,626, 605 and # 3,626,606, the KF moment of the odd-A nuclide’s unpaired nuclear particle (either proton or neutron) possesses its salient KF force energy moment --- the same energy interaction ongoing between the nuclear, shell-configured particles just quoted from L. J. Rainwater --- available for experimental measurement by means of, for example, the various apparatus described in these two basic patents.
Consider the magnitudes of density enhancement between the nucleon (N) --- e.g., neutron (n) --- and platinum (Pt):
3.5 x 1014 / 2.145 x 101 = 1.6 x 1013
In order to more emphatically portray this thirteen orders of magnitude increase in density, one may compare 30 million years with one minute of time. The unpaired N, collectively, of the odd-A nuclide is the viable hardware available for experimentally measuring the interaction of... matter in motion... as regards the KF force energy.
Although it is an extreme example, a 100-pound bar of beryllium (Be) possesses 11.1 pounds of unpaired nuclear particles interacting, in part, with an additional 11.1 pounds of paired nuclear particles --- via mass imagery. Consequently, 22.2 pounds of spinning, orbiting, vibrating particles --- "all in constant (relative) motions at tremendous velocities..." and with particles densities in the order of 3.5 x 1014 gm/cm3 --- are available in laboratory apparatus where 100 pounds of Be are utilized. It is noted that Be should preferably be utilized within the apparatus of USP # 3,636,605 since Be’s nuclear relaxation time --- from its polarized state --- may be of several day’s duration; Be may well have valuable future application comparable to certain metallic elements, and their alloys, utilized for permanent magnet structures within the realm of electromagnetism.
Because these unpaired nucleons, of the odd-A nuclides, possess external angular momenta (the respective momenta of paired nucleons internally cancel), it has experimentally been determined that the imposing of an applied axis of rotation to odd-A nuclide matter causes spin polarization such as occurs with the Barnett Effect concerning the spins of unpaired electrons within ferromagnetic matter. The means, therefore, are at hand for generating a KF force as the Barnett Effect apparatus has been available for generating a magnetomotive force (mmf).
The KF force moment, by itself, has not yet proven sufficiently energetic, however, to be capable of generating, en masse, a measurable KF field by this imposed axis of rotation technique. Unlike the concept and apparatus, utilized in the Barnett Effect, the field enhancement method of adding the parameter of KF permeability --- by means of field circuit structure fabricated of odd-A nuclide matter --- created a KF intensity of sufficient magnitude for unpaired N polarization and, hence, for measuring with a resulting accuracy, as determined by probability standards (where any ratio achieving a value of 20:1 is not a result of false test readings) of one billion to one.
Regarding field permeability, a KF structure which is composed of odd-A nuclide matter --- for example, of aluminum, copper, vanadium, cobalt, etc. --- bears a parallel with ferromagnetic field circuit structures, as respects electromagnetism, in that the former structure is, in part, of unpaired electrons. No doubt that the relatively few people, knowledgeable in the area of nuclear physics, would judge the KF moment, associated with an unpaired nucleon of an odd-A nuclide, too weak (if indeed they accepted the moment’s existence --- it constitutes a salient rupture (as defined by KF reasoning) of the atomic nucleus and is believed composed of a component of the nuclear binding force --- to interact with the ambient and near-ambient unpaired nucleons of the adjacent atomic structure. This judgment would be based on the energy-interaction distance capabilities of the strong interaction filed; it is thought to be of the order of 10-13 cm. However, this energy ---composed of both the pairing and longer-range binding forces --- has only been measured in the MeV energy range; only 15 KeV is believed necessary --- via KF reasoning --- for interatomic KF moment interaction. This KF moment consists of a modified pairing (short-range) force energy. The binding force, holding this unpaired nucleon within its nucleus, essentially consists of the longer-range force energy.
Whereas the magnitude of the magnetic field --- for a given magnetomotive force (mmf) --- can be increased many thousand-fold by the application of a magnetically-permeable field structure --- ferrites exhibit increases exceeding a factor of 80,000 --- it is presently unknown what the KF increase in magnitude is due to the KF permeability present within various matter for a given KF mmf equivalent. However, this KF magnitude increase has been shown to be manifold from the results of KF permeability tests and KF circuit shunt tests. KF ambient air-gap tests have also demonstrated the preference of the KF for odd-A nuclide matter in contrast to vacuum, air and even-even nuclide matter; a KF probe has measured diminishing KF energy, up to 11.5 cm away from an experimental apparatus’s field circuit air-gap, in proportion to distance from the air-gap, during Qualitative Testing.
The preceding paragraphs, then, provide a descriptive explanation of those experimental techniques which make it possible to incorporate and utilize matter in laboratory apparatus --- for generating mass dynamic interactions --- with densities some 1.6 x 1013 times greater than thought possible by Einstein and others.
As this KF explanation evolves from the micro to the macro condition, it is appropriate to note that matter possesses two properties germane to this writing. There are two mass properties related to all matter: the quiescent property of weight and the dynamic property of inertia. The weight property relates to the gravitational mass since the mass of a body is regarded as the generator of the gravitational field. The inertial property is that property of a body by which the body will remain at rest, or in the same straight line or direction, unless acted upon by some external force. When that external force action is applied, an equal and opposite force reaction concomitantly occurs, as conceived by Newton. According to KF reasoning, this inertial property exists because of the KF presence, and this force reaction is the force reaction of the secondary, time-variant gravitational field induced by the kinemassic field made time-variant.
The macro presence of the KF, in contrast to the micro presence --- the latter as taught in the two US Patent publications referred to above --- has its awareness emerge from the following quotations found in the 4th edition of Van Nostrand’s Scientific Encyclopedia, as follows: "Mach Principle --- The inertial property of matter is a measure of the total matter in the universe and its total relative motion, the kinemassic field being the universal field stress medium required for the communicating of, and for the inherent presence of, this inertial property. Accordingly, when in its inertial state, a body’s kinemassic field is unvarying with time but, in its accelerative state, a body’s kinemassic field is time-variant, and so gives rise to an induced, time-variant, secondary gravitational field which exhibits its presence as a vector force in opposition to the body’s acceleration as defined by Newton’s Laws of Motion".
Consider the following example of the macro KF in which it would seem --- per the Mach Criterion --- to be contrary to the methodicalness of Nature for the KF not to be present: Release a one-pound hardened steel ball which is suspended 10 feet above a hardened steel plate --- the two bodies having a mutual Coefficient of Restitution of 90% --- thus the steel ball rebounds to a height of 9 feet above the plate. Our present acceptance of physics recognizes the following statements to be true: While statically suspended, the ball possesses 10 foot-pounds of energy because of the gravitational field; when released, the ball is in a state of acceleration and, because of this, is in the process of transforming it gravitational potential energy into kinetic energy; at the precise moment of impact between ball and plate, the ball has completed this energy transformation with almost 100% efficiency; after impact, elastic deformations of ball and plate occur; because of the 90% Coefficient of Restitution, there exists 0.9 x 10 ft lb, or 9 foot-pounds, of conservative potential energy stored within the maximally deformed ball-plate system; this potential energy storage is possible because of the stressing of the electromagnetic fields responsible for the crystalline structural integrity of solid matter; as the ball, in its rebound state, just clears the plate surface, the electromagnetic field potential energy storage is mostly transformed to kinetic energy (the total non-conservative energy transformation of one foot-pound appears as thermal energy loss which results in a temperature increase within ball and plate); immediately, the kinetic energy begins an energy transformation back into 9 foot-pounds of gravitational field potential energy, the cycle completing itself only when the ball and plate separate to a 9-foot distance.
The point that is made here concerns the relationship between energy states and the energy fields associated wth these energy states during this cycle of energy transformations. Kindly note: of all these energy states, only the kinetic energy state has no inherent, essential field associated with it, according to the current teachings of physics. This unrecognized field, this missing link, this source of an empty niche, the filling of which is required for energy/field symmetry, a field needed for both rational and linear kinetic energies --- if Nature’s orderliness is to be kept --- is the kinemassic field.
In accordance, then, with that KF statement --- in part, similar to the Mach Principle noted above --- when a body is in its inertial sate, only the kinemassic field is present: however, when a body is in an accelerative state --- including linear acceleration, angular velocity (radial acceleration), and angular acceleration --- the kinemassic field becomes time-variant thereby inducing an associated, secondary, time-variant gravitational field as well.
Although straight-line motions and linear velocities are taught as acceptable states of matter, these concepts may prove to be a handicap in truly understanding Nature since the earth continually accelerates towards the sun which, in turn, is in a continuing state of acceleration towards the center of our nebula which, in turn, is in a state of deceleration with respect to the expanding universe. A path or ray of light could be considered not to represent a straight line due to the gravitational field gradients filling space. No orbit is truly circular. The warped deviations of the near-ellipsoidal orbits of earth satellites tells us much about the earth’s pear-shaped configuration. And so it may be reasoned that so-called straight lines, or curved displacements, are, in reality, extreme examples of curved lines, or curved displacements, possessing near-infinitely long, and curvy, radii; correspondingly, bodies traveling at extremely miniscule accelerations respectively. A geodesic line is the path followed by a particle upon which only gravitational and inertial forces act. An example of such a path is that traveled by a spacecraft towards the outer regions of out planetary system. Such a path is te straightest path possible in a 4-dimensional space-time continuum.
Before reviewing the main thoughts expressed in this writing, it seems that further clarification should be given regarding acceleration of matter by various means.
A distinction is made as to the several modes available for the accelerating of mass according to gravitational field theories and hypotheses. The equivalence Principle is stated in several ways but its essence teaches that the greater the weight property, of one body to another, the proportionately greater is the inertial property of the first body to the other. Hence all bodies, great and small, accelerate equally within the same gravitational field gradient. Qetvos first demonstrated this principle experimentally. Currently this equivalence has been found to hold true to the eleventh order of magnitude.
If matter is accelerated by electromagnetic fields --- both static and DC magnetic fields included --- it is regarded as in its accelerated state. But if matter is accelerated by the gravitational field, theories consider that it remains in its inertial states of rest or translation although, if such matter were released above the surface of the earth at our approximate latitude, bith it and the earth would acclerate towards one another at a combined acceleration of 32.17 ft/sec2.
Kinemassic field reasoning provides for accelerated relative motions even though two bodies are, for example, in translatory motions of constant velocities. Therefore a body may be at rest in its relationship to the motion-averaging of universal relative motion --- with respect to that spatial matter, still within KF communication either because of the curvature of space or, alternatively, because of not exceeding the velocity, viz., of electromagnetic propagation --- but still be in an accelerative state of motion with respect to a local second body which also is in its inertial rest state also with respect to inertial space. Bodies, in these so-called inertial states --- although experiencing distinct local relative motions --- are reasoned to be centered within the sphere of the universe’s total relative motion. This concept is more easily grasped if the inertial state is that one of rest. Here the vector summation, of this total relative motion, is zero, when measured by an observer located at the position of the sphere-centered body in its rest state, as would the gas molecules within a gas-filled chamber when the chamber is held at a zero temperature gradient. When in its inertial state of translation, the body remains sphere-centered because of the curvature of space as a mite would remain centered on the surface of a sphere, as it moved about in an imaginary, so-called 3-dimensional universe of space-time.
One final distinction is presently worth citing. The same edition of Van Nostrand’s Scientific Encyclopedia earlier referenced (p. 973), under Gravitation and Gravity: "Einstein’s Equivalence Principle makes no distinction between gravitation and centrifugal force...". Providing this statement is quoted correctly by Van Nostrand, then a further difference exists between this field theory of gravity and the KF reasoning in the respect that the KF reasoning makes a distinction between the gravitational field force and the centrifugal/ centripetal force pair arising from radial acceleration: this distinction concerns the differences in the characteristics of the two force gradients. For all practical purposes, the earth’s gravitational field force gradient diminishes exponentially --- to the second power --- as elevation is gained along a local vertical above the earth. The centrifugal force, acting on a spinning body’s particles, diminishes linearly along a radial line of approach to the body’s axis of rotation.
In review then --- as regard the macro state of the KF from an inertial point of view --- all matter is in an accelerative state of universal relative motion. Consequently, when based on the foregoing reasoning, the kinemassic field is everywhere, in its time-variant state, continuously inducting tie-variant gravitational fields. The kinemassic field provides the explanation for, and is the cause of, the inertial property of matter. When matter is accelerated --- that is: when the kinemassic field is made time-variant --- this time variance causes induction of a secondary, time-variant gravitational field; its physical presence is mechanically felt as that F = Mdv / dt force reaction so well expressed by Newton’s second and third laws of motion as stated by Harvey E. White in Classical and Modern Physics: Second Law --- The rate at which momentum of a body changes is equal to the force acting and takes place in the direction of the straight line in which the force acts. Third Law --- "to every action force there is always an equal and opposite reaction force".
Briefly, in closing, unpaired nucleons are reasoned to not only possess spin axes and magnetic moments but also kinemassic moments . This hypothesis seemingly is borne out by the actual testing of polarized odd-A nuclide matter, in which field forces --- probed/sensed up to 11.5 cm from the apparatus’ field circuit test air gap --- were measured and determined not to be of electromagnetic or gravitational energies. Because these bodies of matter are 1.6 x 1013 more dense than platinum and because their mass dynamic interactions are comprehended as naturally occurring within atomic nuclei, the measuring of such matter interactions within experimental laboratory apparatus was deemed worth trying to measure. The important concept of field permeability was incorporated within the apparatus and, as was experimentally verified, success depended upon the utilization of permeable field circuit structure in order to provide sufficient field enhancement for detection and measurement. This micro KF then is to be identified in its macro form and, as briefly reviewed in the preceding paragraph, provides the surprising insights that the inertial forces of mass acceleration arise from induction of a secondary gravitational field via a time-variant kinemassic field, the kinemassic field providing the inertial property of matter.
Method & Apparatus for Generating a Secondary Gravitational Force Field
Henry W. Wallace
December 14, 1971
US CL. 35-19
Abstract -- Apparatus and method for generating a time variant non-electromagnetic force field due to the dynamic interaction of relatively moving bodies through gravitational coupling, and for transforming such force fields into energy for doing useful work.
Description
The method for generating such time variant force fields including the steps of juxtaposing in field series relationship a stationary member of spin nuclei material, and a member capable of assuming relative motion with respect to said stationary member also characterized by spin nuclei material; initiating relative motion by rotation of said one member with respect to the other, which rotational motion may occur both about an axis within the plane of said other member and about an axis perpendicular thereto; whereby the rotational motion of said one member about the axis perpendicular to the plane of said other member results in the dual interaction of the angular momentum property of said other member thereby resulting in a dynamic interaction field arising through gravitational coupling which dynamic interaction is further characterized by its non-electromagnetic nature and its mass-proximity and relative motion dependency; the rotation of said one member about the axis within the plane of said other interaction field within said other member which in turn gives rise to a secondary time-variant gravitational field in the surrounding space.
The present invention relates to an apparatus and method for generating a time-variant force field due to the relative motion of moving bodies; which force field exhibits itself in the form of an induced secondary gravitational force. As such, this invention constitutes a continuation-in -part of an application field Nov. 4, 1968 by the same inventor, entitled Method & Apparatus for Generating a Dynamic Force Field and bearing Ser. No. 773,116 (US Patent #3,626,606).
In the practice of the present invention it has been found that when bodies composed of certain material are placed in relative motion with respect to one another there is generated an energy field therein not heretofore observed. This field is not electromagnetic in nature; being by theoretical prediction related to the gravitational coupling of relatively moving bodies.
The initial evidence indicates that this non-electromagnetic field is generated as a result of the relative motion of bodies constituted of elements whose nuclei are characterized by half integral "spin" values, the spin of the nuclei being associated with the net angular momentum of the nucleons thereof. The nucleons in turn comprise the elemental particles of the nucleus; i.e. the neutrons and protons. For the purposes of the present invention the field, generated by the relative motion of materials characterized by a half integral spin value, is referred to as a "kinemassic" field.
It will be appreciated that relative motion occurs on various levels, i.e., there may be relative motion of discrete bodies as well of the constituents thereof including, on a subatomic level, the nucleons of the nucleus. The kinemassic force field under consideration is a result of such relative motion, being a function of the dynamic interaction of two relatively moving bodies including the elemental particles thereof. The value of the kinemassic force field created, by reason of the dynamic interaction of the bodies experiencing relative motion, is the algebraic sum of the fields created by reason of the dynamic interaction of both elementary particles and of the discrete bodies.
For a closed system comprising only a stationary body, the kinemassic force, due to the dynamic interaction of the subatomic particles therein, is zero because of the random distribution of spin orientations of the respective particles. Polarization of the spin components so as to align a majority thereof in a preferred direction establishes a flux field aligned with the spin axes of the elementary particles. The present invention is in part comprised of an apparatus for polarizing its spin nuclei material, while additional means are provided to induce an alternating or undulating effect in the kinemassic field so generated.
Accordingly, a primary object of the present invention concerns the provision of means for generating a time-variant kinemassic field within a permeable field body due to the dynamic interaction of relatively moving bodies and the relative motion of said generating means with respect to the permeable field body.
The kinemassic force field finds theoretical support in the laws of physics, being substantiated by the generalized theory of relativity. According to the general theory of relativity, there exists not only a static gravitational field but also a dynamic component thereof due to the gravitational coupling of relatively moving bodies.
This theory proposes that two spinning bodies will exert force on each other. Heretofore the theoretical predictions have never been experimentally substantiated; however, as early as 1896, experiments were conducted on stationary bodies placed near large, rapidly rotating masses. The results of these early experiments were inconclusive, and little else in the nature of this type of work is known to have been conducted.
It is therefore another object of the present invention to set forth an operative technique for generating a measurable time-variant force field due to the gravitational coupling of relatively moving bodies.
In carrying out the present invention, means are provided to enable the relative rotational motion of a first member with respect to a stationary member positioned in close proximity thereto; the construction of one embodiment of the first member being such as to enable portions thereof to assume rotational motion about an axis perpendicular to the plane of said stationary member. The effect of the rotation of said member about the axis perpendicular to the plane of the stationary member is to establish a kinemassic force field in the nature of that referred to in the aforementioned co-pending application of the same inventor. The rotation of said member about the axis lying within the plane of said stationary member results in an undulation of the dynamic interaction field within said field members which in turn induces a secondary time-variant gravitational field in the surrounding space.
Accordingly, another more specific object of the present invention concerns a method of generating a non-electromagnetic force field due to dynamic interaction of relatively moving bodies and for utilizing such force field to further generate a secondary gravitational field.
The foregoing objects and features of novelty which characterize the present invention, as well as other objects of the invention, are pointed out with particularity in the claims annexed to and forming a part of the present specification. For a better understanding of the invention, its advantages and specific objects allied with its use, reference should be made to the accompanying drawings and descriptive matter in which there is illustrated and described a preferred embodiment of the invention.
In the drawings:
Figure 1 shows an overall view of equipment constructed in accordance with the principles of the present invention, including means to demonstrate the effect of a time-variant kinemassic force field;
[Click to enlarge]

Figure 2 is an isolation schematic of apparatus components comprising the time-variant kinemassic field circuit of Figure 1;

Figures 3, 3A, 3B, 4 and 5 show the details of construction of the generator and detector assemblies of Figures 1 and 2;
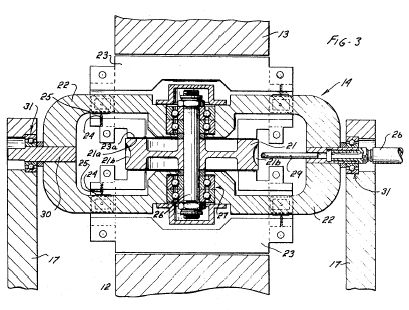




Figure 6 represents
measured changes in operating characteristics of the apparatus
of Figures 1 and 2 demonstrating the time-variant nature of
the kinemassic force field so produced;
[Click to
enlarge]

Figures 7, 7A and 7B
are sectioned views of various embodiments of the present
invention for demonstrating the time-variant nature of the
kinemassic force field as used in establishing a secondary
gravitational component.
[Click to
enlarge]



Before getting into a detailed discussion of the apparatus and the steps involved in the practice of the present invention, it should be helpful to and understanding if the present invention of consideration is first given certain defining characteristics thereof, many of which bear an analogous relationship to electromagnetic field theory.
A first feature is that the kinemassic field is vectorial in nature. The direction of the field vector is a function of the geometry in which the relative motion between mass particles takes place.
The second significant property of the kinemassic field relates the field strength to the nature of the material in the field. This property may be thought of as the kinemassic permeability by analogy to the concept of permeability in magnetic field theory. The field strength is apparently a function of the density of the spin nuclei material comprising the field circuit members. Whereas the permeability in magnetic field theory is a function of the density of unpaired electrons, the kinemassic permeability is a function of the density of spin nuclei and the measure of magnitude of their half integral spin values. As a consequence of this latter property, the field may be directed and confined by interposing into it denser portions of desired configuration. For example, the field may be in large measure confined to a closed loop of dense material starting and terminating adjacent a system wherein relative motion between masses is occurring.
A further property of the kinemassic force field relates field strength to the relative spacing between two masses in relative motion with respect to one another. Thus, the strength of the resultant field is a function of the proximity of the relatively moving bodies such that relative motion occurring between two masses which are closely adjacent will result in the generation of a field stronger than that created when the same two relatively moving bodies are spaced farther apart.
As mentioned above, a material consideration in generating the kinemassic force field concerns the use of spin nuclei material. By spin nuclei material is meant materials in nature which exhibit a nuclear external angular momentum. This includes both the intrinsic spin of the unpaired nucleon as well as that due to the orbital motion of these nucleons.
Since the dynamic interaction field arising through gravitational coupling is a function of both the mass and proximity of two relatively moving bodies, then the resultant force is predictably maximized within the nucleus of an atom due to the relatively high densities of the nucleons plus the fact that the nucleons possess both intrinsic and orbital components of angular momentum. Such force fields may in fact account for a significant portion of the nuclear binding force found in all of nature.
It has been found that for certain materials, namely those characterized by a half integral spin value, the external component of angular momentum thereof will be accompanied by a force de to the dynamic interaction of the nucleons.
This is the so-called kinemassic force which on a sub-macroscopic basis exhibits itself as a dipole moment aligned with the external angular momentum vector. These moments are of sufficient magnitude that they interact with adjacent, or near adjacent, spin nuclei field dipole moments of neighboring atoms.
This latter feature gives rise to a further analogy to electromagnetic field theory in that the interaction of adjacent spin nuclei field dipole moments gives rise to nuclear domain-like structures within matter containing a sufficient portion of spin nuclei material.
As in electromagnetic field theory, in an unpolarized sample the external components of angular momentum of the nuclei to be subjected to a kinemassic force field are randomly oriented such that the material exhibits no residual kinemassic field of its own. However, establishing the necessary criteria for such a force field effects a polarization of spin components of adjacent nuclei in a preferred direction thereby resulting in a force field which may be represented in terms of kinemassic field flux lines normal to the direction of spin.
The fact that spin nuclei material exhibits external kinemassic forces suggests that these forces should exhibit themselves on a macroscopic basis and thus be detectable, when arranged in a manner similar to that for demonstrating the Barnett effect when dealing with electromagnetic phenomena.
In the Barnett effect a long iron cylinder, when rotated at high speed about its longitudinal axis, was found to develop a measurable component of magnetization, the value of which was found to be proportional to the angular speed. The effect was attributed to the influence of the impressed rotation upon the revolving electronic systems due to the mass property of the unpaired electrons within the atoms.
In an apparatus constructed in accordance with the foregoing principles it was found that a rotating member such as a wheel composed of spin nuclei material exhibits a kinemassic force field. The interaction of the spin nuclei angular momentum with inertial space causes the spin nuclei axes of the respective nuclei of the material being spun to tend to reorient parallel with the axis of the rotating member. This results in the nuclear polarization of the spin nuclei material. With sufficient polarization, an appreciable field of summed dipole movements emanates from the wheel rim flange surfaces to form a secondary dynamic interaction with the dipole moments of spin nuclei contained within the facing surface of a stationary body positioned immediately adjacent the rotating member.
When the stationary body, composed of suitable spin nuclei material, is connected in spatial series with the rotating member, a circuitous form of kinemassic field is created, the flux of which is primarily restricted to the field circuit.
If now means are provided to periodically reverse the direction of rotation of the wheel with respect to the facing surfaces of the stationary body positioned in immediate proximity thereto, then the resultant time-varying kinemassic field generates or induces an accompanying time-varying secondary gravitational field in the space immediately surrounding. That is to say, if the time-varying kinemassic field is made to undulate typically sinusoidally, there will be induced an accompanying undulating secondary gravitational field, which is phase-related to the kinemassic field. In this respect the induced secondary gravitational field is generated in a manner analogous to electromagnetic induction theory.
By properly configuring the undulating kinemassic field, the resultant secondary gravitational field may be essentially restrained to or confined within an enclosed space. Although numerous geometric configurations may be proposed, the necessary conditions are established in the preferred embodiment of the present invention by enclosing the kinemassic field generating apparatus, including the rotational members and at least a portion of the stationary member thereof, within an enclosure, the material portions of which obey the rules concerning kinemassic permeability.
The kinemassic field when so configured, will shield the enclosed space both with respect to the secondary gravitational field induced therein and with respect to the ambient gravitational field caused by the earth and other cosmic bodies, existing externally of the shielded space. The undulating kinemassic field, which gives rise to the enclosed secondary undulating gravitational field, is effective in reducing the quantity of flux lines within the space surrounded by the undulating kinemassic field contributed by the ambient gravitational field, thus reducing the mutual force of gravitational attraction acting between this structure and the earth or other cosmic bodies dependent upon their relative contribution to the local gravitational flux density.
It is well known that nature opposes heterogenous field flux densities. If the normal local flux density contributed by the earth and the other cosmic bodies within the space occupied by and surrounded by the undulating kinemassic field permeable structure were added to by the forcibly enclosed flux of the induced secondary undulating gravitational field, this enclosed flux density would be in opposition to nature. Although the induced secondary undulating gravitational field would cause an undulating variation of the cosmic or primary gravitational field flux lines of force to penetrate within the kinemassic field permeable structure, if this undulation were sinusoidal, for example, the RMS or 0.707 value of peak reduction in mutual gravitational attraction would apply.
Means for increasing the relative magnitude of the undulating kinemassic field is effected by positioning a mass circuit within the induced secondary field space. The mass circuit in linking with the undulating kinemassic field circuit results in an increase in the kinemassic field and in the same sense effectively intensifies the primary gravitational field shielding. A partial parallel can be found in electromagnetic field theory, where it is known that a shorted secondary turn enhances iron saturation.
The mass circuit located in the induced secondary field space need not be comprised of material having a spin nuclei characteristic; rather, it is more important that this mass circuit have high mass density. A further desirable characteristic if this mass circuit is that it have a capability for mass flow with respect to the undulating kinemassic field structure. Mercury has the desired combination of properties and while other materials may be used, mercury is the most effective thus far known.
As indicated above, the effective result of generating a secondary undulating gravitational field within the space enclosed by the undulating kinemassic field is a relative reduction in apparent weight of the kinemassic field permeable structure, with respect to its apparent weight without such an undulating kinemassic field. The explanation of this phenomenon may be readily conceived as caused by the generation of a field force vector anti-parallel in direction to the local gravitational field force vector. If the shielding is sufficiently effective to reduce the density of gravitational field flux lines within the shielded space to the equivalent of the ambient flux lone density, there will be no net local distortion of the gravitational field flux line pattern in the space enclosed by the kinemassic field configuration. Without distortion of the local flux line pattern the two bodies cease to mutually attract and, in effect, become weightless, one with respect to the other.
Although similar in result, the technique for effecting the state of weightlessness in the present invention differs from conventional apparatus for achieving such a state of weightlessness. The latter, in general, utilize the force of radial acceleration to effectively "balance" the gravitational forces acting on a body.
The relative magnitude of the undulating kinemassic force field and the kinemassic permeability characterizing the associated structure are both influential in determining the effective shielding of the kinemassic field permeable structure. If the shielding is sufficiently effective so as to reduce the primary gravitational field flux line density within the enclosed space to less than that of the ambient, the distortion of the local gravitational field flux line pattern of reduced flux density would result in the anti-parallel field force vector magnitudes exceeding that force of the kinemassic field body's initial weight, i.e., the effective weight of the kinemassic field permeable structure absent the generated undulating kinemassic field. This condition would effectively endow the kinemassic field structure with a negative weight characteristic. As a consequence, the two bodies, that is the kinemassic field body and the earth or other cosmic body, would experience relative motion separating one another along the local primary gravitational field flux lines unless acted upon by other forces.
The hardware required to generate and sustain such an undulating kinemassic field is in part comprised of components which continue to retain a "non-field-energized" weight during the period of field generation. Therefore, the ambient gravitational field flux line pattern within the structure will simultaneously experience zones of both reduced and increased densities. It is the average density of all the zones that determines the magnitude of the anti-parallel field force vector in its opposition to the ambient gravitational field force vector. Bodies located within the shielded space enclosed by the undulating kinemassic field will lose their weight with respect to the body earth in direct proportion to the reduction of ambient gravitational field flux lines which are common to it and the body earth.
As a consequence of the above, the shielding which results in a reduction of mutual attraction between bodies screened by the shielding effected by the undulating kinemassic force field does not violate the principle of equivalence. Thus, two free bodies of different masses, located within the shielded space, will fall within this space toward or away from the earth with equal accelerations. Also, the force of mutual gravitational attraction of two or more bodies located within the shielded space will be unaffected by the various degrees of shielding although their freefall acceleration toward one another will be affected.
From the foregoing discussion, it will be appreciated that both for the purpose of detecting the kinemassic field forces operative in the present invention, and for transforming such forces into energy for doing useful work, several basic apparatus elements are necessary. First apparatus is needed to enable masses to be placed in relative motion to one another; which relative motion may occur in two mutually orthogonal directions. In order to maximize field strength the apparatus should be capable of generating high velocities between the particles in relative motion. Furthermore, the apparatus should be configured so that the proximity of the particles which are in relative motion is maximized. The necessity of using relatively dense material comprising half integral spin nuclei for the field circuit portion of the apparatus has already been stressed. These and other features are discussed in greater detail below in explanation of the drawings depicting an implementation of the invention.
In considering the drawings, reference will first be made to the general arrangement of components shown in Figures 1 and 2. As viewed in Figure1, the equipment is mounted upon a stationary base comprising a horizontal structural element 11 which rests upon poured concrete pilings not shown or other suitable structurally rigid material. It should be made clear at the outset that the stationary base although not a critical element in its present form nevertheless serves an important function in the subject invention. Thus, the stationary base acts as a stabilized support member for mounting the equipment and, perhaps more significantly, the horizontal portion thereof is of such material that it tends to localize the kinemassic force field to the kinemassic force field generating apparatus proper. This latter feature is discussed in more detail below. The surface uniformity of the horizontal structural element 11 also facilitates the alignment of equipment components. In the reduction to practice embodiment of the present invention, a layer of shock-absorbing material, not shown, was interposed between the stationary base and the floor.
Shown mounted on the horizontal structural element 11 is the kinemassic force field generating apparatus indicated generally as 10, the lower portion of which is referred to as the lower mass member 12. The lower mass member 12 is not to be confusingly associated with the mass circuit mentioned above as being positioned in the space experiencing the secondary gravitational field. The nature and specific identity of the latter mentioned mass circuit will be more fully explained in connection with the explanation of Figure 7.
An upper mass member 13 is positioned in mirrored relationship with respect to member 12 and separated somewhat to provide two air gaps therebetween. The lower and upper mass members 12 and 13 function as field circuit members in relationship to a generator 14 and a detector 15 positioned with respective one's of two said gaps. The spatial relationship of the generator 14, the detector 15 and the mass members 12 and 13 is such as to form a kinemassic force field series circuit.
All of the material members of the field circuit are comprised of half integral spin material. For example, the major portion of the generator 14, the detector 15, as well as the upper and lower mass members 13 and 12 are formed of a particular brass alloy containing 89% copper of which both isotopes provide a three-halves proton spin, 10% zinc, and 1% lead as well as traces of tin and nickel. The zinc possesses one spin nuclei isotope which is 4.11% in abundance and likewise the lead also contains one spin nuclei isotope which is 22.6% in abundance. In order to gain an estimate of apparatus size, the upper mass member 13 has an overall length of 56 m and a mass of 43 kilograms.
It will be seen that, by far, the constituents of the mass members a re such as satisfy the criteria of half integral spin nuclei material for those apparatus parts associated with the field and the use of non-spin nuclei material for those parts where it is desired to inhibit the field. Accordingly, all support or structural members, such as the horizontal element 11 consist of steel. The iron and carbon nuclei of these structural members are classed as no-spin nuclei and thus represent high relative reluctance to the kinemassic field. Supports 1 are provided to accommodate the suspension of the upper mass member 13. The supports 16 are of steel the same as the horizontal support element 11. The high relative reluctance of steel to the kinemassic field minimizes the field flux loss created in the field series circuit of mass members 12 and 13, the generator 14 and the detector 15. The loss of field strength is further minimized by employing high-reluctance isolation ridges at the point of contact between the lower and upper mass members 12 and 13, and the structural support members 11 and 16.
Shunt losses within the apparatus were, in general, minimized by employing the technique of minimum mass contact; the use of low field permeability material at the isolation bridges or structural connections; and avoiding bulk mass proximity.
A number of techniques were developed for optimizing the isolation bridge units including Carboloy cones and spherical spacers. As is depicted more clearly in Figures 3,4,and 5, the structural connection unit ultimately utilized consisted of a hardened 60° steel cone mounted within a setscrew and bearing against a hardened steel platen. The contact diameter of the cone against the platen measured approximately 0.007 inch and was loaded within elastic limits. Adjustment is made by means of turning the setscrew within a mated, threaded hole.
Figure 2 is presented in rather diagrammatic form; however, the diagrammatic configuration emphasizes that it consists of a rotatable member corresponding to the generator 14 of Figure 1 which is "sandwiched" between a pair of generally U-shaped members corresponding to the lower and upper mass members 12 and 13 of Figure 1. The wheel of the generator 14 is mounted for rotation about an axis in the plane of the drawing. The generator assembly is also shown as being mounted for rotation about an axis perpendicular to the plane of the drawing; however, the generator assembly may alternatively be oriented to rotate in the plane of the drawing. When member 14 is rotated rapidly with respect to the U-shaped member 12 and 13, a kinemassic field is generated which is normal to the plane defined by the rotating member and within the plane of the drawing. As such, it may be represented in the drawing of Figure 2 as taking a generally counter-clockwise direction with respect to the field series circuit members.
Referring once more to Figure 1, it is seen that support for the generator unit 14 is provided by way of a support assembly 17, also fabricated of steel components. The support assembly 17 is in turn clamped to the horizontal structural element 11 by way of bracket assemblies 18.
The detector 15 is of similar configuration to the generator assembly 14, the exception being that the detector assembly is mounted for limited rotation about the axis normal to the plane of the paper. The limited rotational capability is effected by a knife-edge mounting 19 more clearly discernable in Figures 3A and 3B. As will become more readily apparent from the discussion of the operation of the embodiment of Figure 1 which follows, the knife-edge mounting enables a slow sinusoidal oscillation of the detector assembly about its knife-edge axis.
A pair of light-emitting and light-sensing elements 20a and 20b respectively are shown in Figure 1 in operative relationship to the generator and detector assemblies 14 and 15. The function of the light-generating and light-sensing members 20a and 20b is to measure the rate of spin of the generator and detector wheels respectively. For this purpose every other quadrant on the rim surface is painted black. Accordingly, light directed at the rim of the wheel will be reflected by the unpainted surfaces into light-sensing cells associated with a rate-sensing circuit of conventional design. Since the rate-measuring circuit forms no part of the present invention it has not been depicted in the actual drawing nor is it the subject of further explanation.
Compressed air or nitrogen is used to drive the generator and detector wheels. In this respect the compressed gas is directed against turbine buckets 21b cut in the rim of wheel 21 of both the generator and detector assemblies and such buckets are more readily discernible in Figures 3, 4, and 5.the compressed gas is supplied to the generator and detector assemblies by way of air supply lines 28a and 28b.
Figures 3, 4 and 5 present details of the generator and detector assemblies of Figures 1 and 2. In particular, these figures disclose the relationship between a freely rotatable wheel 21, a bearing frame 22m and a pair of pole pieces 23. The bearing frame 22 is of structural steel, and functions to spatially orient the three generator parts without shunting the generated field potential as well as to maintain this orientation against the force moment stresses of precession.
Positioning of the generator wheel 21 with respect to the cooperative faces of the pole pieces 23 is effected by way of the bearing frame upon which the generator wheel is mounted. In this respect the high-reluctance isolation bridges mentioned with respect to Figures 1 and 2 are herein shown as set screws 24 which are adjustably positioned to cooperate with hardened steel platens 25. The set screws 24 are mounted on the pole pieces 23 and are adjustably positioned with respect to steel platens 25 cemented to the bearing frame 22 with respect to the interface surfaces 23a of the pole pieces 23.
In the implementation of the present invention the air gap formed between the generator wheel rim flanges and the stationary pole pieces 23 was adjusted to a light-rub relationship when the wheel was slowly rotated; as such this separation was calculated to be 0.001 centimeter for a wheel spin rate of 28,000 rpm due to the resulting hoop tension. In the drawing of Figure 3 the spacing between the pole pieces 23 and the generator wheel rim flange has been greatly exaggerated to indicate that in fact such a spacing does exist.
The generator wheel 21 utilized in the implementation of the present invention has an 8.6 cm diameter and an axial rim dimension of 1.88cm. The rim flange surfaces 21a which are those field emanating areas closely adjacent the surfaces 23a of the pole pieces 23, are each 29.6 square cm. The rim portion of the wheel has a volume of 55.7 cubic cm neglecting the rim turbine slots 21b.
The generator wheel 21 and an associated mounting shaft 26 are mounted of the bearing frame 22 by means of enclosed double sets of matched high speed bearings 27.
Shaft members 30 carry suitable bearing members 31 for rotatably mounting the generator assembly with respect to a second axis. The support assembly 17 of Figure 1 is partially represented in Figure 3, and as noted above provides the mounting means for positioning the generator assembly 14 with respect to the lower and upper mass members 12 and 13.
Reference is now made to Figures 3A and 3B which disclose a portion of the detector 15 of Figure 1 including the knife-edge mounting 19 of Figure 1. Adjusting means 32 are shown connected to the bearing frame 22a of the detector assembly 15 by means of a disc-like member 33. Attached to the lower portion of the disc 33, and depicted in the end view of the detector assembly of Figure 3B, is shown a second adjusting member 34, which in combination with equivalent members 32 and 34 mounted on the other end of the detector assembly, provide means for symmetrically aligning the detector assembly within the gap provided by the lower and upper mass members 12 and 13. This further means that the knife-edge assembly is mounted so that the knife-edge axis is coincident with the geometric axis of the detector assembly. At the same time, the center of mass of the detector assembly is located below the geometric center of the detector assembly thereby providing a righting moment to the assembly due to the asymmetry of the mass center with respect to the knife-edge axis. The adjusting means 32 is shown as bearing against the support assembly 17, thereby, in combination with the knife-edge mounting at either end of the detector assembly, providing an effective four point suspension for symmetrically positioning the detector assembly 15 within the end poles of the upper and lower mass members.
In Figures 1, 2 and 3 the detector assembly 15 is shown in three different positions. As will become apparent from the discussion of the operation of the subject system which follows, the facility to so reposition the detector assembly is necessary to demonstrate its operative capabilities. Accordingly, the bearing frame 22a is rotatably mounted with respect to the disc 33 by means of a bearing surface interfacing the frame 22a with the shaft 35, the latter being affixed to the face of the disc 33.
Proceeding now to the explanation of the operation of the embodiment of the invention thus far disclosed, it will be appreciated that in accordance with the theory of operation of the present apparatus when the generator wheel is made to spin at rates upwards of 10 to 20 thousand rpm, effective polarization of spin nuclei within the wheel structure gradually occurs. This polarization gradually gives rise to domain-like structures which continue to grow so as to extend their field dipole moment across the interface separating the rim 21 from the pole pieces 23. Secondary dynamic interaction of gravitational coupling increases the field flux lines around the kinemassic force generating assembly, thus resulting in ever increasing total nuclear polarization of half integral spin nuclei.
The non-electromagnetic forces so generated within the subject apparatus are primarily channeled through the high-kinemassic permeability material defining the series field circuit of the apparatus. The fact that the high speed rotatable wheels of both the generator and detector assemblies are capable of being positioned in a series aiding or series opposing relationship, facilitates the determination of the effective influence of the energies generated in one on the other.
The detector, when carefully balanced on its knife-edges as shown in Figures 3A and 3B, exhibits an oscillation period of 11 seconds. When the wheels are energized a stiffening action is induced due to the reaction of the compressed gas impingement against the wheel bucket 21b, since the jet nozzle is fixed with respect to the apparatus base. This results in a reduction of the oscillation period to approximately 6 seconds. A light image not shown is directed against the mirrored face of the knife-edge 19 and reflected onto a calibrated wall screen. Measurements were taken with the apparatus so operative, which measurements established the oscillatory extremes of the reflected light beam for a pole-aligned relationship of the spinning generator and detector wheels. The results of one such set of measurements are recorded in Figure 6. Therein, the x's and dots represent extremes in deviation while the large circles represent the mean thereof. The mean was in turn used to establish a null line to be compared with a similar null line derived from pole-opposed orientation of the generator and detector wheels. As a result, a displacement from equilibrium of approximately 13 arc minutes is shown.
In order to minimize the shift of the null line, the field circuit polar relationship of the generator and detector poles was reversed every30 or 40 minutes from a relation of poles aligned, to poles opposed, to poles aligned. An average null shift of 26 arc minutes is indicated in Figure 6. That the interaction between generator and detector was in fact accountable for the recorded results was demonstrably supported when the upper mass member was raised so as to create two air gaps one cm in length respectively. Predictably, the disruption to the field circuit continuity resulted in the failure of the apparatus to register a shift in the null lines upon reversal of the poles.
Reference is now made to Figure 7 which discloses an apparatus constructed in accordance with the principles of the present invention for generating a time-variant secondary gravitational field. This apparatus is a mere modification of the apparatus in Figures 1 and 2 wherein one detector assembly 15 has been removed and supplementary means are provided to mechanically implement the rotation of the generator assembly 14 about the axis perpendicular to the pane of the paper. These supplementary means are in the nature of an auxiliary motor 36 having a drive pulley 38 adapted to spin the generator assembly 14 about an axis normal to the plane of the drawing and coincident with that of the shaft 30. The shaft 30 carries a pulley 40 which is driven by the motor and pulley assembly 36-38 by way of a conventional drive belt 42. The wheel 21 of the generator assembly 14 is driven in the manner outlined above, namely by means of a source of compressed air not shown.
The supporting assembly depicted in Figure 7 in partially sectioned form as member 44, is in reality the equivalent of the series mass circuit of Figures 1 and 2, inverted or turned inside out so s to form a shield for the kinetic field generating apparatus. Included as part of the supporting assembly is member 44A which is provided to position the generator assembly 14 in the discontinuity formed in the mass circuit. The kinemassic field generated within the apparatus of Figure 7 upon energization of the wheel 21 is directed in an enveloping fashion about its generator, being confined in general to the shell. The cross sectional thickness of the shell along equipotential lines must be equal in order to ensure a homogenous field within the structure. If now the spin rate of the wheel 21 is made to vary, or if the generator assembly 14 is made to rotate about the axis defined by the shaft 30, a time-variant secondary gravitational field is induced in the toroidal space 46.
The secondary gravitational field undulates in a sinusoidal manner with the undulating kinemassic field confined to the series mass circuit. Since the kinemassic field in the dense mass circuit 44 has been restricted through permeability, into an enveloping shell about the generator 14, it follows that the induced undulating secondary gravitational field is likewise restricted to the enclosure 46 as the flux lines of both fields must interlink. In accordance with the analogous electromagnetic field theory, the kinemassic field flux lines and the secondary gravitational field flux lines interlink in such manner that, as the kinemassic field alternates, these interlinking loops decay and build up in alternate vector directions in proper phase relation.
A hollow ring member 48 is positioned within the toroidal space 46 and supported thereby a series of fine steel wire spokes 50 secured to the ring and the outer portion of the inverted core housing 44 preferably along points of equipotential of the kinemassic field. Within the hollow ring 48 is contained a dense fluid such as mercury depicted in Figure 7 generally as member52. Alternatively, the ring-fluid combination may take the form of a single solid mass. In the latter event the mass circuit would be supported on bearings facilitating its rotation about an axis common to the axis of the generator 21 in order to permit mass flow or rotation of the mass circuit under the influence of the alternating secondary gravitational field. The shielding effected by the design considerations of the toroidal shell 44 with respect to the primary gravitational field reduces the inertial parameter of mass acceleration within the toroidal space 46 in proportion to the ambient gravitational shielding effect. With reduced inertia there will be an appreciable rotational flow displacement of the mass circuit 48-52 fore ach half cycle of the induced secondary gravitational field, thereby further strengthening the coupling effected between the effective field forces, i.e., the primary gravitational field, the kinemassic field and the secondary gravitational field.
Consider now that the apparatus of Figure 7 is energized such that the wheel 21 spins about its axis creating a uniformly distributed kinemassic field throughout the entire field circuit referred to generally as that encompassed within the inverted core housing 44. As the generator assembly 14 is energized to rotate about the axis passing through shaft 30, a uniformly distributed alternating kinemassic field is established throughout the field circuit.
The presence of the undulating kinemassic field produces a shielding effect within the inverted housing effectively restricting the induced secondary gravitational field while at the same time tending to shield or force out the flux due to the ambient gravitational field. As the spin rates of the wheel and the generator assembly about their respective axes are increased, there results a stronger undulating kinemassic force field of higher frequency. The spin rates may be so varied that a mean gravitational flux line density within the apparatus of Figure 7 exists which is equivalent to the primary gravitational flux line density, i.e., that due to the earth and other cosmic bodies. This condition establishes a state of weightlessness or zero gravitational force of attraction with respect to other masses such as earth. For that particular value of gravitational field gradient.
If the spin rates of the wheel and the generator assembly are further increased there results a "bowing-out" or spreading of the gravitational flux lines within the immediate proximity of the apparatus of Figure 7 so as to result in a lesser flux line density, thus resulting in the propulsion of the apparatus along the local gravitational field lines of force in a direction diametrically opposed to the local gravitational field force vector.
Because of the nature of the interaction of the primary gravitational field, the secondary gravitational field forces will continue to act upon the apparatus as it passes into lesser gravitational field gradients; however, it will do so with diminishing magnitudes until the local gravitational flux line density about the apparatus of Figure 7 is no longer effectively diminished thereby. The energy required to propel a vehicle powered by an engine, such as is described above, is accounted for by the way of the gravitational filed potential energy gained by such a vehicle as it passes to areas of lesser gravitational field intensities. Energy input into this engine would appear as the product of torque and rotational values about the spin axes of both the wheel and the generator assembly, and especially about the latter axis which is responsible for alternating the kinemassic field and thereby generating the secondary gravitational component.
As was mentioned above in explanation of the embodiment of Figures 1 and 2, the wheel 21 and the generator assembly 14 are mounted so as to be rotatable in mutually orthogonal directions. It was further mentioned that such orthogonal rotation is not an absolute necessity, it being only necessary that relative motion be established between the wheel 21 and the stationary pole pieces 23. The generator assembly is made to rotate thereby effecting an undulation in the kinemassic field flux in the associated mass circuit. Figure 7A and 7B disclose a variation of the apparatus of Figure 7 which satisfies the basic requirements outlined above while at the same time providing certain advantages not available in the aforementioned structure.
In this respect Figures 7A and 7B disclose an embodiment wherein the spin axis of the equivalent wheel structure 21 and the generator assembly 14 are concentric thereby eliminating precessional forces present in the embodiment of Figure 7 due to the rotation of the respective members about the two mutually orthogonal axes. The absence of precessional forces permits a close tolerance to be established between the cooperating faces of the wheel structure 21, the pole pieces 23 and the mass circuit 44.
The embodiment of Figures 7A and 7B is also to be preferred to that of Figure 7 in that the design of the generator assembly of the former permits the energization of the independently rotatable members 21 and 23 by means of a single motor 36 differentially geared so as to effect the rotation of the wheel 21 at a speed in excess of that of the generator assembly, and as indicated, in a reverse direction thereto.
Also indicated in the embodiment of Figures 7A and 7B is the orientation of the flux within the mass circuit, the latter being constructed preferably of bismuth. It should be understood that the direction of flux within the mass circuit reverses with each reversal in orientation of the equivalent pole pieces 23 due to the rotation of the generator assembly 14.
It will be apparent from the foregoing description that there has been provided an apparatus for generating time-variant kinemassic forces due to the dynamic interaction of relatively moving bodies. Although in its disclosed application the time-variant kinemassic force has been described in relation to its function in generating a secondary gravitational force, it should be readily apparent that other equally basic applications of these forces are contemplated.
Thus, in addition to providing an effective propulsion technique, the principles of the present invention may be utilized for the purpose of generating localized areas of gravitational shielding for housing medical patients for which such weight reductions would be beneficial. In addition, the principles may be adapted to laboratory use, as for example the analysis of the effects of a sustained reduction of "g" value upon astronauts and for specialized manufacturing techniques.
While in accordance with the provisions of the statutes there has been illustrated and described the best form of the invention known, it will be apparent to those skilled in the art that changes may be made in the apparatus described without departing from the spirit of the invention as set forth in the appended claims, and that in some cases, certain features of the invention may be used to advantage without corresponding use of other features.
Having now described the invention, what is claimed as new and for which it is desired to secure Letters Patent is:
(1) An apparatus for establishing a time-variant kinemassic force field resulting for the relative motion of moving bodies, comprising a generator assembly independent portions of which are mounted to assume relative rotational motion about at least a single axis locate within said generator assembly, a mass circuit of dense material of discontinuous configuration, means for positioning said generator assembly within said mass circuit discontinuity, and means for initiating independent relative motion of said generator assembly portions whereby an undulating kinemassic force field is established within said mass circuit.
(2) Apparatus according to claim 1 further characterized in that said mass circuit and said relatively moving portions are comprised of spin nuclei material.
(3) An apparatus according to claim 1 wherein said mass circuit is further characterized by first and second U-shaped members positioned in mirrored relationship with respect to each other and displaced somewhat so as to form two air gaps therebetween, one of said gaps corresponding to said mass circuit discontinuity and being adapted to receive said generator assembly and the other gap being adapted to receive a detector assembly.
(4) Apparatus constructed in accordance with claim 1 wherein said mass circuit is further characterized by a shell of generally toroidal configuration having a cylindrical central portion within which is located said mass circuit discontinuity.
(5) An apparatus constructed in accordance with claim 2 wherein said generator assembly mounted within said mass circuit discontinuity further comprises a rotatable member, a frame, means for mounting said rotatable member on said frame, pole pieces mounted on said frame on either side of said rotatable member, each pole piece presenting a generally circular face in close proximity to but spaced from a face of said rotatable member about a first axis, and means for rotating said frame about a second axis oriented perpendicular to said first axis.
(6) Apparatus constructed in accordance with claim 4 and further characterized by a dense mass ring mounted within the walls of said shell structure by mounting mass establishing small area contact between said mass ring and said shell structure.
(7) An apparatus constructed in accordance with claim 6 wherein said dense mass ring is further comprised of a hollow shell housing a liquid metal of suitable density.
(8) Apparatus according to claim 6 wherein said shell is further characterized as being of equal cross sectional area normal to the kinemassic lines of force.
(9) Apparatus constructed according to claim 3 wherein said shell is further characterized as being of equal cross sectional area normal to the kinemassic lines of force.
(10) A method of generating a time-variant kinemassic force field including the steps of:
juxtaposing in field series relationship a first member comprised of spin nuclei material similarly constituted, portions of said member being adapted to assume relative rotational motion about at least a single axis;
initiating the independent rotation of said first member about at least a single axis whereby an undulating kinemassic force field is established therein;
and so configuring said second member as to confine said undulating kinemassic force field thereto whereby a time-variant secondary gravitational force field is induced in the surrounding space.
US3626606
Method & Apparatus for Generating a Dynamic Force
Field
Abstract -- Apparatus and method for generating a non-electromagnetic force field due to the dynamic interaction of relatively moving bodies through gravitational coupling, and for transforming such force fields into energy for doing useful work.
Description
The method of generating such non-electromagnetic forces includes the steps of juxtaposing in field series relationship a stationary member, comprising spin nuclei material further characterized by a half integral spin value, and a member capable of assuming relative motion with respect to said stationary member and also characterized by spin nuclei material of one-half integral spin value; and initiating the relative motion of said one member with respect to the other whereby the interaction of the angular momentum property of spin nuclei with inertial space effects the polarization of the spin nuclei thereof, resulting in turn in a net component of angular momentum which exhibits itself in the form of a dipole moment capable of dynamically interacting with the spin nuclei material of the stationary member, thereby polarizing the spin nuclei material in said stationary member and resulting in a usable non-electromagnetic force.
This invention relates to an apparatus and method for use in generating energy arising through the relative motion of moving bodies and for transforming such generated energy into useful work. In the practice of the present invention it has been found that when bodies composed of certain material are paced in relative motion with respect to one another there is generated an energy field therein not heretofore observed. This field is not electromagnetic in nature; being by theoretical prediction related to the gravitational coupling of moving bodies.
The initial evidence indicates that this non-electromagnetic field is generated as a result of the relative motion of bodies constituted of elements whose nuclei are characterized by half integral "spin" values; the spin of the nuclei being synonymous with the angular momentum of the nucleons thereof. The nucleons in turn comprise the elemental particles of the nucleus; i.e., the neutrons and protons. For purposes of the present invention, the field generated by the relative motion of materials characterized by a half integral spin value is referred to as a "kinemassic" force field.
It will be appreciated that relative motion occurs on various levels; i.e., there may be relative motion of discrete bodies as well as of the constituents thereof including on a subatomic level, the nucleons of the nucleus. The kinemassic force field under consideration is a result of such relative motion, being a function of the dynamic interaction of two relatively moving bodies including the elemental particles thereof. The value of the kinemassic force field, created by reason of the dynamic interaction of the bodies experiencing relative motion, is the algebraic sum of the fields created by reason of the dynamic interaction of both elementary particles and of the discrete bodies.
For a closed system comprising only a stationary body, the kinemassic force, due to the dynamic interaction of the particles therein, is zero because of the random distribution of spin orientations of the respective particles. Polarization of the spin components so as to align a majority thereof in a preferred direction establishes a field gradient normal to the spin axis of the elementary particles. The present invention is concerned with an apparatus for establishing such a preferred orientation and as a result generating a net force component capable of being represented in various useful forms.
Accordingly, the primary object of the present invention concerns the provision of means for generating a kinemassic field due to the dynamic interaction of relatively moving bodies.
A further object of the present invention concerns a force field generating apparatus wherein means are provided for polarizing material portions of the apparatus so as to reorient the spin of the elementary nuclear components thereof in a preferred direction thereby generating a detectable force field.
The kinemassic force field finds theoretical support in the laws of physics, being substantiated by the generalized theory of relativity. According to the general theory of relativity there exists not only a static gravitational field but also a dynamic component thereof due to the gravitational coupling of relatively moving bodies. This theory proposes that two spinning bodies will exert force on each other. Heretofore the theoretical predictions have never been experimentally substantiated; however, as early as 1896, experiments were conducted in an effort to detect predicted centrifugal forces on stationary bodies place near large, rapidly rotating masses. The results of these early experiments were inconclusive, and little else in the nature of this type of work is known to have been conducted.
It is therefore another object of the present invention to set forth an operative technique for generating a measurable force field due to gravitational coupling of relatively moving bodies.
Another more specific object of the present invention concerns a method of generating a non-electromagnetic force field due to the dynamic interaction of relatively moving bodies and for utilizing such forces for temperature control purposes including the specific application of such forces to the control of lattice vibrations within a crystalline structure, thereby establishing an appreciable temperature reduction, these principles being useful for example in the design of a heat pump.
The foregoing objects and features of novelty which characterize the present invention as well as other objects of the invention are pointed out with particularity in the claims annexed to and forming part of the present specification. For a better understanding of the invention, and its advantages and specific objects allied with its use, reference should be made to the accompanying drawings and descriptive matter in which there is illustrated and described a preferred embodiment of the invention.
In the drawings:
Figure 1 is an
overall perspective view of equipment constructed according to
the present invention, this equipment being designed
especially for demonstrating the useful applications of
kinemassic force fields;
[Click to
enlarge]

Figure 2 is an
isolation schematic if apparatus comprising the kinemassic
field circuit of the apparatus of Figure 1, showing the field
series relationships of the generator and detector units;
[Click to
enlarge]
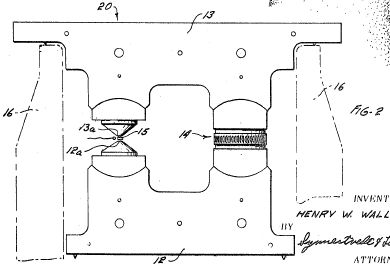
Figures 3, 4, and 5
show the generator of Figures 1 and 2 in greater detail;
[Click to
enlarge]



Figure 6 is an
enlarged view of the detector working air gap area of the
apparatus in Figures 1 and 2;
[Click to
enlarge]

Figure 7 is a
sectional view of Figure 6 showing associated control and
monitoring equipment; and
[Click to
enlarge]

Figure 8 represents
measured changes in the operating characteristics of a
crystalline target subject to a kinemassic force field
generated in the apparatus of Figures 1 and 2.
[Click to
enlarge]

Before getting into a detailed discussion of the apparatus and steps involved in the practice of the present invention it should be helpful to an understanding of the present invention if consideration is first given to certain defining characteristics, many of which bear an analogous relationship to electromagnetic field theory. A first feature is that the kinemassic field is vectorial in nature. The direction of the field vector is a function of the geometry in which the relative motion between mass particles takes place.
The second significant property of the kinemassic field relates the field strength to the nature of the material in the field. This property may be thought of as the kinemassic permeability by analogy to the concept of permeability in magnetic field theory. The field strength is apparently a function of the density of the spin nuclei material comprising the field circuit members. Whereas the permeability in magnetic field theory is a function of the density of spin nuclei and the measure of magnitude of their half integral spin values. As a consequence of this latter property, the field may be directed and confined by interposing into it denser portions of desired configuration. For example, the field may be in large measure confined to a closed loop of dense material starting and terminating adjacent a system wherein relative motion between masses is occurring.
A further property of the kinemassic force field relates field strength to the relative spacing between two masses in relative motion with respect to one another. Thus, the strength of the resultant field is a function of the proximity of the relatively moving bodies such that relative motion occurring between two masses which are closely adjacent will result in the generation of a field stronger than that created when the same two relatively moving bodies are spaced farther apart.
As mentioned above, a material consideration in generating the kinemassic force field concerns the use of spin nuclei material. By spin nuclei material is meant materials in nature which exhibit a nuclear external angular momentum component. This includes both the intrinsic spin of the unpaired nucleon as well as that due to the orbital motion of these nucleons.
Since the dynamic interaction field arising through gravitational coupling is a function of both the mass and the proximity of two relatively moving bodies, then the resultant force field is predictably maximized within the nucleus of an atom due to the relatively high densities of the nucleons, both in terms of mass and relative spacing, plus the fact that the nucleons possess both intrinsic and orbital components of angular momentum. Such force fields may in fact account for a significant portion of the nuclear binding force found in all nature.
It has been found that for certain materials, namely those characterized in a half integral spin value, the external component of angular momentum thereof will be accompanied by a force due to the dynamic interaction of the nucleons. This is the so-called kinemassic force which on a submacroscopic basis exhibits itself as a field dipole moment aligned with the external angular momentum vector. These moments are of sufficient magnitude that they interact with adjacent, or near adjacent spin nuclei field dipole moments of neighboring atoms.
This latter feature gives rise to a further analogy to electromagnetic field theory in that the interaction of adjacent spin nuclei field dipole moments gives rise to nuclear domain-like structures within matter containing sufficient spin nuclei material.
Although certain analogies exist between the kinemassic force field and electromagnetic field theory, it should be remembered that the kinemassic force is essentially non-responsive to or affected by electromagnetic force phenomena. This latte condition further substantiates the ability of the kinemassic field to penetrate through and extend outward beyond the ambient electromagnetic field established by the moving electrons in the atomic structure surrounding the respective spin nuclei
As in electromagnetic field theory, in an unpolarized sample, the external components of angular momentum of the nuclei to be subjected to a kinemassic force field are originally randomly oriented such that the material exhibits no residual kinemassic field of its own. However, establishing the necessary criteria for such a force field effects a polarization of the spin components of adjacent nuclei in a preferred direction thereby resulting in a force field which may be represented in terms of kinemassic field flux lines to the direction of spin.
The fact that spin nuclei material exhibits external kinemassic forces suggests that these forces should exhibit themselves on a macroscopic basis and thus be detectable, when arranged in a manner similar to that for demonstrating the Barnet effect when dealing with electromagnetic phenomena.
In the Barnett effect a long iron cylinder, when rotated at high speed about its longitudinal axis, was found to develop a measurable component of magnetization, the value of which was found to be proportional to the angular speed. The effect was attributed to the influence of the impressed rotation upon the revolving electronic systems due to the mass property of the unpaired electrons within the atoms.
In the apparatus constructed in accordance with the foregoing principles it was found that a rotating member composed of spin nuclei material exhibits a kinemassic force field. The interaction of the spin nuclei angular momentum with inertial space causes the spin nuclei axes of the respective nuclei of the material being spun to tend to reorient parallel with the axis of the rotating member. This results in the nuclear polarization of the spin nuclei material. With sufficient polarization, an appreciable field of summed dipole moments emanates from the wheel rim flange surfaces to form a secondary dynamic interaction with the dipole moments of spin nuclei contained within the facing surface of a stationary body positioned immediately adjacent the rotating member.
When the stationary body, composed of suitable spin nuclei material, is connected in spatial series with the rotating member, a circuitous form of kinemassic field is created; the flux of which is primarily restricted to the field circuit.
Having now further defined the substantiating theory giving rise to the kinemassic forces operative in the present invention, reference is now made to the aforementioned drawings depicting in general an apparatus embodying the defining characteristics outlined above.
From the foregoing discussion, it will be appreciated that for both the purpose of detecting and exploiting the kinemassic field, several basic apparatus elements are necessary. First, apparatus is needed to enable masses to be placed in relative motion to one another. In order to maximize field strength the apparatus should be capable of generating high velocities between the particles in relative motion. Furthermore, the apparatus should be configured so that the proximity of the particles which are in relative motion is maximized. The necessity of using relatively dense material comprising half integral spin nuclei for the field circuit has already been stressed. These and other features are discussed in greater detail below in explanation of the drawings depicting an implementation of the invention, primarily for detection of the kinemassic field.
In considering the drawings, reference will first be made to the general arrangement of components, as particularly shown in Figures 1 and 2. As viewed in Figure 1, the equipment is mounted upon a stationary base comprising a horizontal structure element 10 which rests upon permanent pilings of poured concrete 11 or other suitable structurally rigid material. It should be made clear at the outset that the stationary base although not a critical element in its present form nevertheless serves an important function in the subject invention. Thus, the stationary base acts as a stabilized support member for mounting the equipment, and perhaps more significantly, the horizontal portion thereof is of such material that it tends to localize the kinemassic force field to the kinemassic force field generating apparatus proper. This latter feature is discussed in more detail below. The surface feature is discussed in more detail below. The surface uniformity of the horizontal structure element 10 also facilitates the alignment of equipment components. In the reduction to practice embodiment of the present invention a layer of shock-absorbing material (not shown) was interposed beneath the stationary base and the floor.
Shown mounted on the horizontal structural element 10 is the kinemassic force field generating apparatus indicated generally as 20, the lower portion of which is referred to as the lower mass member 12. An upper mass member 13 is positioned in mirrored relationship with respect to member 12 and separated somewhat to provide two air gaps therebetween. The lower and upper mass members 12 and 13, respectively, are formed of a particular brass alloy containing 89% copper, of which both isotopes provide a three-halves proton spin, 10% zinc, and 1% lead, as well as traces of tin and nickel. The zinc atom possesses one spin nuclei isotope which is 4.11% in abundance and likewise the lead also contain one spin nuclei isotope which is 22.6% in abundance. In order to gain an estimate of apparatus size, the upper circuit member has an overall length of 56 centimeters and a mass of 43 kilograms.
It will be seen that the constituents of the mass members are such as satisfy the criteria of half integral spin nuclei material for those apparatus parts associated with the fields and the use of non-spin material for those parts where it is desired to inhibit the field. Accordingly, all support or structural members, such as the horizontal structural element 10, consist of steel. The iron and carbon nuclei of these structural members are classed as no-spin nuclei and thus represent high relative reluctance to the kinemassic field. Supports 16 are provided to accommodate the suspension of the supper mass member 13. The supports 16 are of steel the same as the horizontal support element 10. The high relative reluctance of steel to the kinemassic field minimizes the field flux loss created in the field series circuit of mass members 12 and 13, the generator 14, and the detector 15. The loss of field strength is further minimized by employing high-reluctance isolation bridges at the points of contact between the lower and upper mass members 12 and 13, and the structural support members 10 and 16.
Shunt losses within the apparatus were, in general, minimized by employing the technique of minimum mass contact; the use of low field permeability material at the isolation bridges or structural connections; and avoiding bulk mass proximity.
A number of techniques were developed for optimizing the isolation bridge units including Carboloy cones and spherical spacers. As is depicted more clearly in Figures 3,4,and 5, the structural connection unit ultimately utilized consisted of a hardened 60° steel cone mounted within a setscrew and bearing against a hardened steel platen. The contact diameter of the cone against the platen measured approximately 0.007 inch and was loaded within elastic limits. Adjustment is made by means of turning the setscrew within a mated, threaded hole.
Figure 2 is presented in rather diagrammatic form; however, the diagrammatic configuration emphasizes that it consists of a rotatable member corresponding to the generator 14 of Figure 1 which is "sandwiched" between a pair of generally U-shaped members corresponding to the lower and upper mass members 12 and 13 of Figure 1. The wheel of generator 14 is mounted for rotation about an axis lying in the plane of the drawing. When member 14 is rotated rapidly with respect to the U-shaped members 12 and 13, a kinemassic field is generated which is normal to the plane defined by the rotating member and within the plane of the drawing.
As such, it may be represented in the drawing of Figure 2 as taking a generally counterclockwise direction with respect to the field series circuit members.
Referring once more to Figure 1, it is seen that support for the generator unit 14 is provided by way of a support assembly 17, also fabricated of steel components. The support assembly 17 is in turn clamped to the horizontal structural element 10 by way of bracket assemblies 18.
In the embodiment of the present invention depicted in Figures 1 and 2, the lower and upper mass members 12 and 13 are fashioned into conical sections terminating in conical pole faces 12a and 13a in the area of the detector 15. This configuration tends to maximize the flux density in this area.
For isolation purposes, a curtain of transparent plastic material 19 is positioned so as to geometrically bisect the detector portion of the field circuit from the generator portion thereof. The function of the transparent curtain is to provide a degree of thermal isolation between the generator and detector units. Although not actually shown in Figure 2, the transparent curtain is of H configuration and forms a vertical plane normal to the plane of the drawing and symmetrically positioned with respect thereto.
Not shown in the drawings are a tunnel of transparent material and a film of flexible plastic material which surrounds the detector 15 and associated equipment and thus serve to further stabilize the temperature conditions, thereby diminishing the adverse effects due to thermal gradients.
Before proceeding with the explanation of the operation of the apparatus disclosed in Figures 1 and 1, a more detailed description of certain portions of the structure will be given.
Figures 3, 4, and 5 present the generator assembly 14 of Figures 1 and 2 in greater detail. In particular, these figures disclose the relationship between a freely rotatable wheel 21, a bearing frame 22, and a pair of pole pieces 23. The bearing frame 22 os of structural steel, and functions to spatially orient the three generator parts without shunting the generated field potential.
Positioning of the generator wheel 21 with respect to the cooperative faces of the pole pieces 23 is effected by way of the bearing frame upon which the generator wheel is mounted. In this respect the high-reluctance isolation bridges mentioned with respect to Figures 1 and 2 are herein shown as setscrews 24 which are adjustably positioned to cooperate with hardened steel platens 25. The setscrews 24 are mounted on the pole pieces 23 and are adjustably positioned with respect to steel platens 25 cemented to the bearing frame 22 so as to facilitate the centering of the generator wheel 21 with respect to the interface surfaces 23a of the pole pieces 23.
In the implementation of the present invention the air gap formed between the generator wheel rim flanges and the stationary pole pieces 23 was adjusted to a light-rub relationship when the wheel was slowly rotated; as such this separation was calculated to be 0.001 centimeter for a wheel spin rate of 28,000 rpm due to the resulting hoop tension. In the drawing of Figure 3 the spacing between the pole pieces 23 and the generator wheel rim flange has been greatly exaggerated to indicate that in fact such a spacing does exist.
The generator wheel 21 utilized in the implementation of the present invention has an 8.6 cm diameter and an axial rim dimension of 1.88cm. The rim flange surfaces 21a which are those field emanating areas closely adjacent the surfaces 23a of the pole pieces 23, are each 29.6 square cm. The rim portion of the wheel has a volume of 55.7 cubic cm neglecting the rim turbine slots 21b.
The generator wheel 21 and an associated mounting shaft 26 are mounted of the bearing frame 22 by means of enclosed double sets of matched high speed bearings 27.
Compressed air or nitrogen is used to drive the generator wheel by means of gas impingement against turbine buckets 21b cut in the wheel rim. The compressed gas is supplied through the supply line 28 and emanates from the air jet tube 29. Rate of spin is sensed by light rays reflected from the rim. For this purpose every other quadrant on the rim surface was painted black. Accordingly, light directed at the rim of the wheel will be reflected by the unpainted quadrants into light-sensing cells associated with a rate-measuring circuit of conventional design. Since the rate-detecting means form no part of the present invention they have not been depicted in the actual drawing.
Shaft members 30 carry suitable bearing members 31 for rotatably mounting the generator assembly with respect to a second axis. The support assembly 17 of Figure 1 is partially represented in Figure 4, and, as noted above it provides the mounting means for positioning the generator assembly 14 with respect to the lower and upper mass members 12 and 13.
Before proceeding to an explanation of the operation of the generator assembly with respect to the apparatus of Figure 1, reference is made to Figures 6 and 7 which disclose an enlarged view of the detector 15. The lower and upper mass members 12 and 13 are given a conical configuration so as to maximize kinemassic densities in the area of the working air gap, within which the detector is positioned. Figure 7 represents a sectional view taken across the working air gap, showing the projection of the conical surface of the upper mass member onto the corresponding surface of the lower mass member. Although symmetrical in shape, the projection of the conical surface of the upper mass member onto the corresponding surface of the lower mass member has been slightly reduced for purposes of illustration. In the subject apparatus the two conical brass pole faces 12a and 13a form a working air gap measuring 0.114 cm across. Each disc shape pole face measures 0.71 square cm in area.
The detector or probe 15 is of indium arsenide and is inserted in the detector air gap with a spacing from either pole face of 0.02 cm, the target thickness measuring 0.07 cm. Both indium and arsenic possess 100% isotope abundance of half integral spin nuclei; arsenic nuclei consist of one isotope of three halves proton spin, while indium nuclei are of two isotopes, both being nine-halves proton spin.
A second probe of similar semi-conductor material 15a is shown in Figure 6 as being positioned in close proximity to the first detector. Both probes 15 and15a are shown mounted on a boom 15b which is shock-mounted by means not shown. Shock mounting of the components is important due to the relatively close spacing between the probe and conical pole faces. Lateral displacement of the second probe from the vicinity of the working air gap measured as 25 cm.
Although not critical to the overall theory of the present invention, the selection of a semi-conductor probe of the nature heretofore described and the effective results realized through the positioning of the probe 14 and the associated probe 15a with respect to the working air gap between the conical pole faces as well as the manner in which signals measured by the two probes is correlated, are important to an understanding of the forces involved. In this respect it is important to realize that the first and second semi-conductor probes were differentially connected in terms of electrical output and are polarity-sensitive to magnetic field measurements. Together the two probes constitute a differential magnetic probe for an FW Bell Gaussmeter. As conventionally used, such probes provide a measure of the magnetic field intensity from both AC and DC sources, via the Hall Effect. The Hall Effect is a well known phenomenon whereby a potential gradient is developed in a direction transverse to the direction of current flow within a conductor when the conductor is positioned in a magnetic field. It should be clearly understood, however, that no magnetic field phenomenon is associated with the present invention. Thus the lateral voltages which are measured in the present arrangement are not Hall voltages. This statement is substantiated by the explanation that follows, clearly establishing the absence of any hall voltage indicative of magnetic fields. In this respect, the two probes are differentially connected for magnetic field measurements to eliminate errors due to ambient magnetic field changes whereas they are additively connected for sensing changes in thermal vibration of crystal lattices. Although polarity sensitive to the magnetic field, the differential magnetic probe is not polarity-sensitive to changes in thermal vibration of crystal lattices.
The fact that the probes are polarity-sensitive with respect to magnetic field but not with respect to the direction of crystal lattice vibrations means that when the probes are reversed with respect to polarity any discernable difference in the output readings might be attributed to a magnetic field induced into the system by the rotating wheel. Inasmuch as the field conductive portions of the apparatus are comprised predominantly of brass which is a paramagnetic material, no appreciable magnetic field should be detected. This in fact corresponds to the actual results in that no measurable difference in magnetic flux was recorded when the polarity of the probe was changed. It is thus possible to realistically discount magnetic fields as influencing operating results.
As seen in Figure 7, the detector 15 has associated therewith two pairs of contacts 32 and 33, the first of which represents current contacts connected in turn to a source of constant current 34 of conventional design. The second set of contacts 33 are voltage contacts connected to detect any potential gradient transverse to the direction of current flow within the detector. The meter 36 represents means for detecting such potential differences and may be in the form of a very sensitive galvanometer.
A thermocouple 35 is positioned in close proximity to the detector 15 to monitor the temperature thereof. Temperature differences, such as recorded by the thermocouple 35, are used for purposes of providing correction figures to the test results. A similar thermocouple is used in conjunction with the second detector 15a, as well as with the upper mass member particularly in the area of the generator wheel. Thermocouples are used for temperature monitoring since the energy change of their conducting electrons, by which they sense temperature change, are not measurably affected by the kinemassic field.
Proceeding now to an explanation of the operation of the subject invention, it will be appreciated that in accordance with the theory of operation of the present apparatus when the generator wheel is made to spin at rates upwards of 10 or 20 thousand rpm, effective polarization of spin nuclei within the wheel structure gradually occurs. This polarization gradually rises to domain-like structures which continue to grow so as to extend their field dipole moment across the interface separating the rim 21 from the pole pieces 23. Secondary dynamic interactions of gravitational coupling between respective dipoles increase the field flux lines around the apparatus field circuit, thus resulting in ever-increasing total nuclear polarization of half integral spin nuclei.
The non-electromagnetic forces so generated within the subject apparatus are directed to the working air gap within which is positioned the semi-conductor probe 15. Therein the kinemassic forces are constructively used to reduce the vibrational degrees of freedom of the crystal lattice structure, resulting in a change of its electrical conductivity property. More specifically, the kinemassic field, due to the dynamic interaction of the gravitational coupling of the mass components of the wheel in relation to the stationary portions of the pole pieces in immediate proximity therewith, is restricted to the relatively high permeability material comprising the lower and upper mass members, and is concentrated at the working air gap by means of the conical pole pieces. Inserted in the air gap is the probe of semiconductor spin nuclei material.
Control circuitry connected to two of the four contacts on the semiconductor probe 15 is designed to maintain a constant current flow across these contacts. At the same time the ambient temperature of the area surrounding the equipment is permitted to increase. In fact the increase in ambient temperature is initiated well in advance of the initiation of rotation of the generator wheel giving rise to the non-electromagnetic kinemassic force field. The constant increase in temperature is meant to mask out otherwise positive and negative temperature variations resulting in a signal-to-noise ratio of measurement.
In light of the gradual and constant increase in temperature of both the equipment and ambient conditions surrounding the equipment, it might be expected that the thermal vibrations of crystal lattice of the semiconductor probe would likewise increase. In actuality, a measurable decrease in crystal lattice vibrations is detected within the semiconductor probe. The actual measurements recorded are in terms of nanovolts of meter movement, and correspond to a decrease in lateral voltages measured across the semiconductor probe. These values can only be accounted for by an effective polarization of the spin nuclei of the lattice structure due to the polarizing effects of the applied kinemassic force field. The polarization results in a change in the specific heat property of the crystal material, which in turn reflects itself as an increase in electrical conductivity measurable by the galvanometer.
Reference is now made to Figure 8 which discloses in graphical relationship the results achieved by various test arrangements of the semiconductor probe with respect to the subject apparatus.
In the interpretation of the graphical relationships of Figure 8 it should be understood that corrections for temperature variations have already been applied. These temperature corrections account for the heat applied to the system, as well as that due to the change in specific heat property of the apparatus due to frictional heating, as well as that due to the change in specific heat property of the apparatus, principally the brass members die to their relative bulk. The later component represents a positive contribution to the ambient temperature due to the decrease in degrees of freedom of the crystal lattice structure of the spin nuclei material when subjected to the kinemassic force field. The above mentioned heat factors result in the increased temperature of the brass members of the apparatus; these increases being monitored by way of thermocouples positioned in proximity to the kinemassic field generating apparatus, member 35 of Figure 7 being an example thereof.
Curve 1 of Figure 8 represents a static test conducted over a period of 150 minutes, values being recorded at 3 minute intervals which was standard procedure for the entire test series. Information gathered in respect to curve 1 was useful in determining compensating factors for ambient temperature changes. In curve 1 as well as each of the other curves of Figure 8, the ordinate values measure a level of thermal vibration, in nanovolts of meter movement, of InAs lattice structure against time in which ambient temperature change of the two probes has been quantitatively compensated.
Curve 2 represents a portion of a standard test run, the portion shown being the active portion of the curve, i.e., that portion of the curve for which measurable results were recorded due to the spinning of the generator wheel. Not included in curve 2 are measurements taken during a 78-minute pre-energizing thermal calibration period typical of the initial portion of each test run conducted. The pre-energizing thermal calibration period is effected in order to illustrate the ambient temperature compensation of the probes and as such is similar to that of the static test of curve 1.
The first 45 minutes of the indicated 150 minute test period of curve 2 represents the time during which the continuity of the negatively sloping curve prior to, during and following the time interval of the wheel returning to its no-spin state, and subsequently (an indication of a return toward thermal equilibrium percentage distribution of spin angular moment) is consistent with the explanation advanced above concerning the force field generated due to the dynamic interaction of relatively moving bodies. It should be noted with respect to curve 2 that separate test runs conducted some 6 weeks apart tend to corroborate the independent test results. The results of the two separate tests are superimposed in curve 2. These two tests, in addition to being spaced in time, were spaced many test runs apart. The two test results further establish the repeatability of the operation.
The change in thermal vibration of the InAs crystal lattice for the test run of curve 2 is approximately equivalent to an11° C reduction in probe temperature. This figure has been substantiated by computer studies. The computer has also been used to statistically analyze the test data and establish the probability of error in terms of the information recorded. In this respect the results of the computerized study indicate a probability of error of 1 in 1 billion. Since any ration in excess of 1 in 20 eliminates the probability of chance occurrence, the results obtained in the present instance should be above reproach.
In order to substantiate the distance dependency of the gravitational coupling force due to the dynamic interaction of relatively moving bodies it was predicted that increasing the separation between the generator rim flange 21a and the cooperating surface of the pole pieces 23a should measurably reduce the results obtained. The results obtained when this separation was increased to 0.006 cm appears in curve 3. A comparison of these results with those of curve 2 seemingly substantiates the conclusion that upon widening the gap a lessening of the dynamic interaction due to gravitational coupling between the spinning wheel and the stationary pole piece actually occurs.
The data of curve 4 was taken with the air gap separation of the wheel to pole piece established at 0.001 cm as in the arrangement of curve 2; however, the duration of wheel spin was decreased from 45 minutes to 30 minutes. Curve 2 results are shown superimposed on the solid line of curve 4. The relative magnitudes of curves 2 and 4, when so contrasted with their respective wheel spin periods, would appear to indicate a degree of half integral spin nuclei polarization saturation.
Curve 5 depicts the results achieved by way of a shunt test wherein two lead bars were secured to the stationary brass bodies of the generator assembly so as to measure the effect of shunting the field at zones of maximum field potential. As contrasted with the results of curve 2, superimposed thereon, a statistically as well as visually significant difference is associated with the experimental results which, realistically, may be attributed to the shunting effect. The statistical study mentioned above substantiates the distinguishable nature of the data groups resulting in curves 2 and 5.
Curve 6 depicts the results of a test run in which the field permeability has been eliminated by removal from the test apparatus of the upper mass member and the two detector conical pole faces. The lower mass member has also been adjusted downward to as to rest on the horizontal structural element 10. At the same time the spatial relationship between the generator assembly and the two differentially connected probes was not altered. As may be observed from the curve 6, there occurred no change in the thermal vibration of the InAs crystal lattice. The plot scatter observable during the 45 minutes wheel spin period is attributable to increased temperature gradients which developed between the probes and the respective thermocouples in the absence of the various filed circuit member thermal masses.
Further experimental results are available to substantiate the heretofore stated conclusions concerning the operating characteristics of the subject apparatus. In this respect reference is made to the copending application of the present inventor entitled Method & Apparatus for Generating a Secondary Gravitational Force Field, field Nov. 4, 1968 and bearing Serial No. 773,051, the subject of which concerns an apparatus for establishing a time-variant kinemassic force field.
It will be apparent from the foregoing description that there has been provided an apparatus for generating and transforming kinemassic forces due to a dynamic interaction field arising through gravitational coupling of relatively moving bodies. Although in its original application the kinemassic force has been applied to the reduction of thermal vibrations in the lattice structure of a crystal, it should be readily apparent that other more significant uses of these forces are contemplated. In this respect the principles of the present invention may well be applied to any system in which bodies are non-responsive or only partially responsive to conventional forces such as electromagnetic force fields. Thus, the present invention should have particular applicability to the stabilization of plasma particles, pursuant to controlled thermal nuclear fusion, or in the governing of temperatures and thermal energies within matter.
While in accordance with the provisions of the statutes, there has been illustrated and described the best forms of the invention known, it will be apparent to those skilled in the art that changes may be made in the apparatus described without departing from the spirit of the invention as set forth in the appended claims and that in some cases, certain features of the invention may be used to advantage without a corresponding use of other features.
Having now described the invention, what is claimed as new and for which it is desired to secure Letters Patent is:
(1) An energy generating and transforming apparatus comprising a first member, said first member further comprised of spin nuclei material and mounted so as to be freely rotatable about an axis located within said first member, at least one stationary member, said stationary member comprised of spin nuclei material and positioned immediately adjacent sad first member, and means for effecting the rotation of said first member whereby it is effective in impressing a non-electromagnetic force onto said stationary member.
(2) A method for generating a non-electromagnetic force field and for converting such force field into useful work comprising the steps of mounting a first member comprised of preferred material in a manner which enables said first member to assume a degree of relative motion with respect to a second member also comprised of preferred material, establishing a degree of relative motion between said first and second members, and sensing the resultant energy due to the dynamic interaction of the relatively moving members.
(3) The method of claim 2 wherein the sensing further comprises the steps of positioning a member of preferred material within said non-electromagnetic force field and measuring the change in the physical characteristics thereof.
(4) An apparatus comprising two U-shaped members of spin nuclei material, non-spin nuclei material means for positioning said U-shaped members in mirrored relationship with one another and separated by two gaps, means including a freely rotatable member of spin nuclei material mounted in one of said two gaps, means including a detector mounted in the other one of said two gaps, and means for effecting the rotation of said freely rotatable member whereby a non-electromagnetic force is impressed upon said detector.
(5) The apparatus of claim 4 wherein the detector positioned within the second of said two gaps comprises a crystalline structure of spin nuclei material such that the non-electromagnetic force impressed upon said crystalline structure is effective in polarizing said spin nuclei material sufficiently to reduce the specific heat properties of the crystalline structure so as to effect a substantial increase in the temperature thereof.
(6) An energy generating apparatus comprising a first member, a second member, and means for establishing relative motion between said first and second members whereby a non-electromagnetic force is generated within said first and second members de to the dynamic interaction of said relatively moving members.
(7) An energy generating and transforming apparatus comprising a mass circuit constructed of spin nuclei material of half integral spin value, said mass circuit having two gaps therein, field generating means rotatably mounted in one of said mass circuit gaps, said field generator means further comprising a frame for rotatably mounting thereon a member comprising spin nuclei material of half integral spin value, the axis of rotation of said rotatable member lying in the plane of said mass circuit, said pole pieces being disposed on said frame on opposite side of said rotatable member, each pole piece presenting a generally circular face in close proximity to but spaced from a face of said rotatable member, said pole pieces being further configured to substantially fill the gap in said mass circuit, means for rotating the rotatable member of said field generator means at high velocity, and means mounted in the other gap of said mass circuit for detecting a field in said circuit.
(8) An energy generating and transforming apparatus comprising: a mass circuit of dense material, and having two gaps therein, mounting means for said mass circuit, mounting means having restricted contact area with said mass circuit, field generator means rotatably mounted in one of said mass circuit gaps; said generator means further comprising a frame, a rotatable member mounted on said frame for rotation, the axis of rotation of said rotatable member lying in a plane of said of said mass circuit throughout all relative positions of said frame, a pair of pole pieces mounted on said frame by mounting means establishing restricted contact area between each pole piece and said frame, said pole pieces being further configured to substantially fill the gap in said mass circuit, means for rotating the rotatable member of said generator means at high velocity, an means mounted in the other gap of said mass circuit for demonstrating a change in physical characteristics within said gap region due to the field generated within said mass circuit.
(9) The apparatus of claim 8, wherein said means mounted in the other gap of said mass circuit comprises a member whose atomic structure is such that it is affected by said field generated within said mass circuit.
(10) A method for controlling the temperature in a crystalline structure by subjecting the crystalline structure to non-electromagnetic forces capable of altering the specific heat properties thereof, including the steps of: connecting in field series relation a mass circuit constructed of dense spin nuclei material of half integral spin value, a field generator constructed essentially of spin nuclei material having a half integral spin value and rotatably mounted in one of said mass circuit gaps, and a crystalline structure also of spin nuclei material having a half integral spin value positioned in the other of said mass circuit gaps; initiating the rotation of said field generator whereby the external angular momentum of spin nuclei material within said rotating field generator interacts with inertial space to effect the polarization of the spin nuclei thereof, resulting in turn in a net component of angular momentum which dynamically interacts with the spin nuclei of the mass circuit thereby further polarizing the nuclei of the material therein; and concentrating the resultant field within said field series circuit onto said crystalline structure within the second of said mass circuit gaps whereby the spin nuclei material of said crystalline structure is sufficiently polarized to reduce the specific heat properties of the crystalline material due to a reduction in degrees of freedom of the lattice vibrations thereby effecting a substantial temperature increase in the body thereof.
Abstract -- Method & Apparatus for utilizing for the purpose of heat flow by means of controlled temperature change a field energy, other than electric, magnetic or gravitational field energies, capable of reducing the specific heat properties of a broad class of substances.
Description
The present invention pertains to manipulation of atomic nuclear structure so as to modify the state of an energy transfer medium, and utilization of the modified medium. More particularly, the invention pertain to effecting reorientation of nucleons of a material whose spin number (1) is half-integral, and imposing the effect of such orientation on a medium adapted to do productive work.
In the past century great strides have been made in harnessing the three degrees of translational movement of electrons in the electromagnetic regime. Very little if anything has been done to utilize the inertial regime comprising the relatively massive nucleons, and particularly the three degrees of rotational freedom thereof, one of which is preempted by nuclear spin.
In my US Patent # 3,626,606, I demonstrated how, by applying a rotational force to material whose nuclear spin number (I) is half-integral, a reorientation can be achieved in the nuclear structure. In my US Patent # 3,626,605, I demonstrated how a time variant may be imposed on the output resulting from such reorientation.
It immediately becomes evident that there are potentially many, many uses of these reoriented nucleons. In all probability, techniques will be found which t some extent parallel those employed for utilization of the electron in the electromagnetic field, and it becomes clear that the thus reoriented nuclear structure may lend itself to such uses as modification of the gravitational field acting on a body so as to alter its gravitational attraction toward another body, separation of isotopes by distinguishing between nuclei according to their nucleon content, generating of gravity waves for communication and other energy transfer, stabilizing of plasma and maintenance of plasma density for controlled nuclear fusion, possible harnessing of cosmic gravitational energy in addition to utilization in many, many other fields.
For purposes of demonstration the utilization of the inventio0n in heat pumps will be explained. For brevity, material whose spin number (I) is half-integral will be referred to hereafter as "spin nuclei material". As in US Patent # 3,626,605 and 3,636,606, the generated field will be referred to as a "kinemassic field".
The Spin Values (I) for the isotopic forms of the elements are well known and may be found in tabular form, for example, "The NMR Table, 5th Edition" published by Varian Associates of Palo Alto, CA. Typical among substances in elemental form having such half integral spin values are beryllium with a neutron spin of I - 3/2, aluminum with a proton spin of I = 5/2, chlorine of which both isotopes provide proton spins of I -3/2, vanadium (useful for alloys) of which one isotope of 99.76% abundance provides a proton spin of I = 7/2, cobalt with a proton spin of I - 7/2, copper of which both isotopes provide spin of I = 3/2, and bromine of which both isotopes provide spins of I = 3/2. These chemical elements and others of half integral spin values may be alloyed together as well as to elements possessing no-spin and integral spin nuclei provided quantity percentages of such additional elements are small.
In US Patent # 3,626,606 it was explained that the kinemassic force resulting from this dynamic interaction of relatively moving bodies of spin nuclei material can be utilized for temperature control purposes including the specific application of such kinemassic forces to the control of lattice vibrations within a crystalline structure thereby establishing an appreciable temperature reduction, these principles being useful, for example, in the design of a heat pump.
The half-integral spin nucleus of this spin nuclei material is characterized by possession of an odd nucleon, either neutron or proton, which is consequently unpaired. The remainder of the nucleons of such a half-integral spin nucleus are acted upon by both the short-range force and the weaker long-range force which together constitute the nuclear binding force. The unpaired nucleon is acted upon only by the weaker long-range force and it is the energy of the absent short-range force characterizing the half-integral spin nucleus contained therein due to their absent short-range force nuclear energy causing an available, responsive energy, this polarization resulting in a diminishing of the lattice vibrations within said crystalline structure.
The kinemassic field may be utilized in static form for reducing the specific heat of such spin nuclei material. Establishing of this static field energy within said atomic structure effectively reduces its specific heat capacity concomitantly causing a controlled temperature increase therein due to the presence of the substance's enthalpy content. Concomitantly there is caused to occur a decrease of temperature which is possessed prior to application of the static field energy. This below-ambient temperature is caused by the now-reduced enthalpy content which resulted from the heat flow away from the substance which had occurred when it contained the static field energy. As a consequence heat now flows back into this substance from the ambient substance of higher temperature.
It is provided for in this invention that the substance, with its controllable specific heat property, be capable of physical transport from one spatial location to another. However, for the following explanation these locations will be limited to two in number. For both spatial locations, the ambient substance possesses an adequate thermal conductivity property. If now the static field energy is caused to be present within the transportable substance of controlled variable specific heat property, when at the first of these spatial locations but removed from this substance when it has been transported to the second of these locations, it is evident that heat flow from the transportable substance into the ambient substance will always occur at the first location identified by the presence of the static field energy and that heat flow from the ambient substance into the transportable substance will always occur at the second location identified by the absence of the static field energy. It is then apparent that the transported substance of spin nuclei material alternately and cyclically experiences temperature changes such that, at the designated first location, its temperature exists at a value higher than that of the temperature of the ambient substance and also, at the designated location, that its temperature exists at a lower value than that of the temperature of the ambient substance. This one-way heat flow from the transported substance into the ambient substance of the designated first location in combination with the one-way heat flow from the ambient substance of the designated second location into the transported substance, this dual heat flow phenomenon, then constitutes a heat pump.
Although several techniques are known for altering specific heat, such as changing the density of a gas, the technique utilized in this invention concerns the limiting of the degrees of freedom of particle vibration of a substance by means of a static energy field. More specifically, consider the thermal vibration of a crystal structure. The assembly of atoms bound together by local atomic forces, composing a crystal lattice, is capable of vibrating in a large number of independent normal modes about a static equilibrium configuration. In these vibrations a large portion of the enthalpy is stored; these vibrations are the major contribution to the structure's specific heat.
One object of this invention is to utilize the so-called kinemassic force to alter the energy state of a relatively movable medium.
A further object of the invention is to condition spin nuclei material so that it will alternately cause heat to flow out of it and into it by means of a temperature change.
A further object is to utilize the kinemassic force field concept in a heat pump.
According to the present invention there is provided a method of modifying the energy state of a relatively movable transfer medium, which comprises applying to a material whose nuclear spin number (I) is half-integral a force which reorients nucleons thereof, exerting on a transfer device a force resulting from said orientation, and exposing said relatively movable transfer medium to said device to effect said modification of the energy state of said medium.
The invention also provides a heat pump comprising a rapidly rotatable generator formed of spin nuclei material closely juxtaposed to said generator and forming therewith a closed field circuit, and heat transfer means formed of spin nuclei material and adapted to move through the vicinity of said relatively stationary body whereby the specific heat of said heat transfer means is altered to accomplish useful work.
In order that the disclosure will be more fully understood and readily carried into effect, the following detailed description is given with reference to the accompanying drawings in which:
Figure 1 is an end view, with housing partly removed, of a heat pump according to the present invention.

Figure 2 is a side view, with housing partly removed, of the heat pump shown in Figure 1.
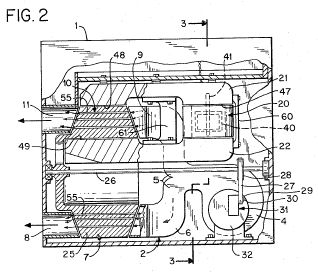
Figure 3 is a sectional view taken along the line 3-3 of Figure 2.

Figure 4 is an end view, with housing partly removed, of the heat pump shown in Figure 1.

Figure 5 is a sectional side view taken along line 5-5 of Figure 4.

Figure 5A is a detailed view of a portion of Figure 5.


Figure 6, 7, 8 and 9 show respectively top, front, side and rear views of symmetrical field circuit segments employed in the embodiment of Figures 4 and 5.




Figure 10 is an end view of a further modification of the invention.

Figure 11 is a sectional view taken along the line 11-11 of Figure 10, and

Figure 12 is a detailed view of one aspect of the eccentric adjustment.

Figures 1 to 3 show a solid-state heat pump. As disclosed in Figures 1 and 2, housing 1 encloses a duct system 2. Air or other fluid is conducted through inlet 3 and into blower 4. Air under pressure emerging from blower 4 is conducted to manifold 5 where it is divided into two air streams, one of which flows through lower duct 6 to reduced-temperature heat flow zone 7 and then to exhaust outlet 8. The other stream of air from manifold 5 flows upwardly through upper duct 9 to increased-temperature heat flow zone 10 and then to exhaust outlet 11.
The kinemassic force, which is utilized in accordance with the invention to effect the desired heat flow is generated in a kinemassic generator rotor 20. Portions of an upper field circuit segment 21 and a lower field circuit segment 22 are juxtaposed to rotor 20 to form therewith a part of a kinemassic field circuit. At the increased temperature heat flow zone 10 a heat flow is effected with air or other fluid as hereinafter described.
To achieve this heat flow, an enthalpy transfer ring 25 is rotatable on a shaft 26 driven by a belt 27 through a pulley 28 mounted on said shaft 26. Said belt 27, in turn, is driven by a pulley 29 mounted on a shaft 30 forming a part of a gear reduction assembly 31. Blower 4 is driven by blower motor 32 which is also connected to a rotor shaft 33 (Figure 3) and worm gear 34 through a worm wheel 35 which is integral with a second worm gear 35 which is integral with a second worm gear 34a which, in turn, drives a worm wheel 35a connected to shaft 30.
As seen in Figure 3 the kinemassic generator rotor 20 includes a generator drive motor 40 which, in the present embodiment, is shown as an inside-out electric motor having shaft 41 mounted integrally on upper field circuit segment 21. The motor may, for example, be a hysteresis type motor and driven by a solid stage frequency-controlled source.
The outer housing 42 of drive motor 40 is adapted to rotate and has integrally mounted thereon a cylindrical generator rotor member 43 formed of spin nuclei-containing material. Drive motor 40 is adapted to rotate cylindrical generator rotor member 43 at extremely high rates of rotation. The kinemotive force generated is a direct function of rate of rotation, so that it is desirable to achieve the highest rate of rotation compatible with the permissible stresses in the system. These stresses vary with the physical size and proportions of said cylindrical generator rotor member 43 and the material of which it is composed. Such rates of rotation can range from approximately 30,000 rpm to values of 100,000 rpm or greater, the lower limit preferably being in the neighborhood of 50,000 rpm.
Cylindrical generator rotor member 43 is formed with a flat pole face surfaces identified as generator lower pole-face 44 and generator upper pole-face 45 at its lower and upper ends respectively which are juxtaposed to flat pole face surfaces identified as lower field pole-face 46 and upper field pole-face 47 forming a part respectively of lower field circuit segment 22 and upper field circuit segment 21. It is essential to maintain air gaps of minimum width between pole face surfaces 44, 46 and between pole face surfaces 45, 47 in order to provide maximum kinemassic field permeability as well as to optimize the secondary interaction of kinemassic field generating.
The upper and lower field circuit segments 21 and 22 are formed of spin nuclei-containing material and each terminates adjacent enthalpy transfer ring 25 as upper enthalpy transfer pole-face 48 and lower enthalpy transfer pole face 49, respectively. The pole faces 48 and 49 are cylindrical surface segments and are equal in surface area. As seen in Figures 1 and 2, these respective pole faces 48 and 49 so encompass a portion of enthalpy transfer ring 25. In order to minimize reluctance, the respective air gaps formed by pole faces 48 and 49 and the juxtaposed portion of enthalpy transfer ring 25 should be of minimum air gap width.
Enthalpy transfer ring 25 is provided with a multiplicity of enthalpy transfer surfaces which may be in the form of tubular channels 55 which, in part, function to increase the enthalpy transfer surface area resulting in greater heat flow between the enthalpy transfer ring 25 and an enthalpy transfer fluid which is caused by blower 4 to flow through duct 9, through these tubular channels 55 and then to exhaust outlet 11. The tubular channels 55, only a few typical ones of which are shown, have a second function of reducing the cross-sectional area of a kinemassic field circuit in the increased-temperature heat flow zone 10 in order to increase the flux density within the permeable portion of ring 25 within zone 10 while imparting a minimum increased reluctance to the overall field circuit. This increased flux density within the permeable portion of ring 25 within zone 10 results in greater reduction of the specific heat of ring 25 within zone 10. The tubular channels 55 may be variously configured and distributed to achieve the foregoing results.
End plate 60 may be accurately pinned then bolted to circuit segments 21 and 22 to maintain the air gaps in position and to support segment 22. Also, connecting block 61 is provided at an intermediate position between segments 21 and 22 for the same purpose.
In operation, after the kinemassic generator rotor 20 has been caused to spin at a high rate of rotation, air fed through inlet 3 I propelled by blower 4 to manifold 5 where it is subdivided into a lower stream flowing through duct 6 and an upper stream flowing through duct 9.
The enthalpy transfer ting 25, which rotates at a suitably low speed, for example, 1 rpm, will undergo a reduction in specific heat in any given portion and then under the influence of the kinemassic force extending between pole faces 48 and 49. The air passing through upper duct 9 will be forced through those tubular channels 55 which are at the instant in the increased-temperature heat flow zone 10 adjacent pole pieces 48 and 49 with the result that the air will experience a temperature rise occurring in said given portion of enthalpy transfer ring 25 due to the reduction of its specific heat arising from the polarization of its spin nuclei under the influence of the kinemassic force, whereby the air which emerges from exhaust outlet 11 will possess a temperature higher than its temperature possessed when it previously flowed through duct 9.
As enthalpy transfer ring 25 continues to rotate, so that said portion thereof departs from the spin nuclei polarizing effect of the kinemassic field flux lines of zone 10, the specific heat will increase again to its normal value thereby causing the temperature of said given portion to drop below that value existent prior to entering zone 10 because of the reduced enthalpy now contained therein. The lower stream of air is forced from duct 6 through those tubular channels 55 in the reduced-temperature heat flow zone 7 with the result that said given portion of enthalpy transfer ring 25, due to its changed state of increased specific heat, will absorb heat from the ambient flowing air, as said given portion of ring 25 reaches zone 7, the result being that the air emerges from outlet 8 with a temperature lower than that temperature possessed when it was flowing through duct 6. IT will be noted, as can be seen from Figure 2, that the increased-temperature heat flow zone 10 is offset, with respect to the vertical, from reduced-temperature heat flow zone 7, this offsetting being desirable for optimum coordination of the specific heat reduction and recovery times respectively of the chosen material forming ring 25 in its passage into and from the zone 10. The positions and configuration of zones 7 and 10 may be varied depending on the specific heat properties of the material forming ring 25.
Turning now to the embodiment of Figures 4 to 9, the same reference numbers have been used, so far as possible, as in Figures 1 to 3 but with primes. The housing 1' encloses a duct system comprising an inlet duct 3', best shown in Figure 5, which leads air to a rotary blower 4' mounted on rotor shaft 33' driven by blower motor 32' through, but bypassing, a drive unit 31' which may be, if desired and as shown, in the form of a harmonic drive unit manufactured by USM Corporation of Shelton, CT.
An enthalpy transfer ring 25' is also mounted for rotation about rotor shaft 33', and is driven by blower motor 32' through drive unit 31' in counter-rotation to rotary blower 4'. While the rate of rotation of rotary blower 4' is preferably between 1745 and 3500 rpm, the rate of counter-rotation of enthalpy transfer ring 25' is relatively slow, for example, one to several rpm. A reduced-temperature duct 6' for leading cooled air from the system to an exhaust 8' is formed by upper baffle 6a and lower baffle 6b and side baffle 6c as shown in Figure 4 and another similar side baffle (not shown), the width of duct 6' being sufficient to snugly overlap enthalpy transfer ring 25'. Similarly, an increased-temperature duct 9' for leading heated air from the system to an exhaust 11' is formed by upper baffle 9a, lower baffle 9b, side baffle 9c, and another side baffle (not shown), the width of duct 9' also being sufficient to snugly overlap enthalpy transfer ring 25'.
Kinemassic generator rotor 20' is provided for generating the desired kinemassic force. As seen in Figures 5 and 5A, the rotor 20' includes a generator drive motor 40' which may be of the so-called "inside-out" type having a stationary shaft 41' on which is mounted a winding 41a. The drive motor 40' may be powered by a generator or solid-state frequency converter (not shown) preferably with an output frequency of approximately 1234 cps. In this embodiment an oil mist supply (also not shown) should be provided for bearing lubrication). The oil mist can, for example, be delivered by a small size air compressor unit. Concentrically mounted on shaft 41' is a rotatable outer iron rotor and conductor cage 42' fitted into housing 42" of generator drive motor 40'. Integrally mounted on said rotatable iron rotor and outer conductor cage 42' is a cylindrical generator rotor member 43' formed of spin-nuclei containing material. Cylindrical generator member 43' is formed with flat pole faces 44' and 45'. Juxtaposed thereto are flat field pole faces 46' and 47' of field circuit segments 21' and 22' formed of spin-nuclei containing material and adapted to provide a path for kinemassic flux between generator rotor member 43' and transfer ring 25'. It is essential to maintain air gaps of minimum width between pole-face surfaces 44', 47' and between pole-face surfaces 45', 46' in order to provide maximum kinemassic field circuit permeability, the width of the air gaps in the drawings being exaggerated for clarity.
The rotor 20' is provided with an axial cylindrical recess 20a adapted to mate with axial cylindrical recesses 23' provided in the field circuit segments 21' and 22' being beveled as shown in Figure 5. Fitted into each of the recesses 23' are respective shaft mounts 50' which non-rotatably secure the shaft 41' to segments 21' and 22', the motor 40' fitting firmly within axial cylindrical recess 20a. The motor 40' may, for example, be a hysteresis type motor driven by a solid-state frequency controlled source. The outer iron rotor and conductor cage 42' of motor 40' rotates about the stationary motor shaft 41' through its mounting on generator drive motor bearings 51' of which there are a pair but only one of which is shown. A concentric bearing block 53' associated with each of the bearings 51' contain s in the illustrated block the power leads for the generator drive motor 40' through power lead channel 52'.
The identical first and second field circuit segments 21' and 22' each terminate adjacent enthalpy transfer ring 25' as first enthalpy transfer pole-face 48' and second enthalpy transfer pole-face 49' respectively. The first enthalpy transfer pole-face 48' and the second enthalpy transfer pole-face 49', in this embodiment, are identical in configuration and having flat surfaces and are of hollow circular segment form as best shown in Figures 6 to 9. As seen in Figures 4 and 5, these respective pole-faces 48' and 49' so encompass a portion of enthalpy transfer ring 25' about portions of its flange surfaces that they provide for minimum kinemassic reluctance of the flux lines passing through that portion of enthalpy transfer ring 25'. The respective air gaps formed by pole-faces 48' and 49' and the adjacent flanges of enthalpy transfer ring 25' should be of minimum width. Enthalpy transfer ring 25' is provided with a multiplicity of enthalpy transfer channels which may be in the form of involute channels 55', the involute surfaces of which may be described by the x,y coordinate equations:
x - a cos ø + a ø sin ø and y = a sm ø - a ø cos ø
where "a" is the inner radius of the enthalpy transfer ring 25' and ø is the polar angle described between the starting point and tangent point of a string which is kept taut while being unwound from a cylindrical surface of radius "a", the curve formed by the string end describing the involute surface of the channel. Such an involute channel in conjunction with the counter-rotating relation between blower 4' and enthalpy transfer ring 25' serve to enhance the enthalpy transfer effect between involute surface and the fluid due to the surface impingement arising from the angular paths required of the fluid particles. More important, the involute channels 55' permit a uniform cross-section of field permeable material distribution from inner radius to outer radius of the enthalpy transfer ring 25' while also causing the kinemassic field flux density increase described for the first embodiment.
As shown in Figure 4, the periphery of blower 4' is partially surrounded by fixed shrouds 5a and an adjustable shroud 5b adapted to control the amount of air flowing into ducts 6' and 9'. The adjustable shroud 5b is attached by bolt and slot connections to the housing of blower 4'. The adjustable shroud 5b is integral with inlet sleeve 5c as shown in Figure 5B in parallel perspective. Inlet sleeve 5c is designed to concentrically nest, in a rotatable sliding relation, within inlet duct 3' as shown in Figure 5. Flange 5d of inlet sleeve 5c possesses an arc slot 5e of a sufficient number of angular degrees that, in conjunction with a bolt stud 5f secured to housing 1' and extending through arc slot 5e in combination with wing nut 5g, adjustable shroud 5b can be fixed in any required angular orientation so as to apportion the air flow in cooperation with shrouds 5a into ducts 6' and 9'.
In operation air under pressure emerging from blower 4' is divided into two air streams by means of the shrouds 5a and 5b. One air stream flows directly into a reduced-temperature enthalpy transfer zone 7' and then through reduced-temperature duct 6' to exhaust 8'. The second air stream flows directly into increased-temperature enthalpy transfer zone 10' and then through increased-temperature duct 9' to exhaust 11'. The fixed shrouds 5a are carefully positioned for directing the air into the two enthalpy transfer zones 7' and 10'. The number of involute channels 55' which are effective at any one time to pass air through enthalpy transfer zones 7' and 10' can be adjusted by varying the setting of movable shroud 5b. By adjusting said shroud 5b so as to reduce the air flow rate through the reduced-temperature enthalpy transfer zone 7', while simultaneously increasing air flow rate through the increased-temperature enthalpy transfer zone 10', a lesser amount of enthalpy will be transferred out of said ring within the increased-temperature enthalpy transfer zone 10', thus resulting in a gradually increasing enthalpy deficit in enthalpy transfer ring 25'. This will then cause the mean temperature of the enthalpy transfer ring 25' to reduce until there is no longer an imbalance between the rate of enthalpy introduced and the rate of enthalpy removed from enthalpy transfer ring 25'. Thus, there is provided a self-stabilizing system since the temperature difference between the ambient temperature air, arriving through inlet duct 3' into the involute channels 55' within the increased-temperature enthalpy transfer zone 10', and the surface temperature of the involute channels 55' will diminish as the average temperature of the enthalpy transfer ring 25' reduces.
The extremes of temperature difference of enthalpy transfer ring 25', occurring between the maximum existent in those involute channels 55' located in enthalpy transfer zone 10' and the minimum existent in those involute channels 55' located in the enthalpy transfer zone 7', not only are dependent upon their temperature values above 0° K as reflected by the average temperature of enthalpy transfer ring 25', but also by the particular half-integral spin nuclei utilized in the enthalpy transfer ring 25'. These temperature differences are therefore limited and consequently determined by the temperature at which self-stabilization will occur as exemplified by that state where the temperature of the air or other fluid entering inlet duct 3' is of the same value as that temperature of the involute channels 55' located in the enthalpy zone 10'. That temperature at which self-stabilization occurs can be significantly lowered by returning to inlet duct 3', by means of commonplace ducting and therefore not shown, a portion of the lower temperature air leaving reduced-temperature duct 6' to exhaust 8'. Thus the average temperature of enthalpy transfer ring 25' can be lowered to a value considerably greater than that temperature difference existent in enthalpy transfer ring 25' between its maximum and minimum values at any moment of time.
It is therefore significant to note that a reduction of the enthalpy transfer ring 25 or 25' mean temperature of from 70° to 35° F represents a reduction of only 6.6% with respect to 0° K and that this technique of heat pumping via cyclic changing of a material specific heat by way of the kinemassic field force is not restricted to a narrow temperature range as is the case in the conventional heat pump with its narrow limits of temperature-pressure parameters required for boiling and condensing states. For example, the temperature difference between the inflowing air or other fluid entering inlet duct 3' and the outgoing air or fluid leaving exhaust 8' can thus be increased by adjusting the blower motor movable shroud 5b, or by other equivalent controls, so as to reduce the air or fluid rate of flow through those involute channels 55' located within the reduced-temperature enthalpy transfer zone 7' and simultaneously increasing the air or fluid rate through those involute channels located within the increased-temperature enthalpy transfer zone 10' while causing the temperature of the outgoing air or other fluid of exhaust 8' to be progressively lowered by means of the reintroduction of a portion of this reduced-temperature air or other fluid of exhaust 8' back into the inlet duct 3'.
Conversely, if it is desired to increase the air or fluid temperature difference between the inflowing air or fluid entering inlet duct 3' and the outgoing air or fluid leaving increased-temperature duct 9' while progressively increasing the temperature of the outgoing air or other fluid of exhaust 11', the blower motor movable shroud 5b is adjusted so as to reduce the air or fluid flow rate through the increased-temperature enthalpy transfer zone 10' and simultaneously increasing the air or fluid flow rate through the decreased-temperature enthalpy transfer zone 7' while reintroducing a portion of this increased-temperature air or other fluid of exhaust 11' back into inlet duct 3', this resulting in a mean temperature increase of the enthalpy transfer ring 25'.
Blower motor movable shroud 5b may also be adjusted by a temperature-responsive servo drive system of conventional design and therefore not shown, which is temperature sensitive to the air or other fluid leaving exhaust 8' or to that of an enclosure, whose temperature is being controlled by this air or other fluid, thus providing an especially effective means of removing enthalpy from a solid or fluid through a broad temperature range. Such a conventional servo system can also be applied to the air or other fluid leaving exhaust 11' or elsewhere that temperature feedback is possible in order more effectively to establish and control elevated temperatures. Where system performance is closely repeatable, a simple time-controlled mechanism may be substituted for either servo system application in driving the blower motor movable shroud 5b.
Referring to the embodiment shown in Figures 10, 11 and 12 a modified kinemassic force generator system is shown to demonstrate advantages to be gained by the presence of additional, usable spin nuclei material at lesser inner diameters occupied by the generator drive motors 40 and 40' in the other embodiments and by increasing in the axial direction the length of the generator rotor 20", such increase being possible without adding to the centrifugal force on the material forming the generator rotor 20" thereby causing a kinemotive force of greater magnitude to occur for a given set of air gaps formed between a generator rotor 20" and field circuit segments 21" and 22".
Field circuit segments 21" and 22" are shown juxtaposed to end surfaces of generator rotor 20' in a manner similar to the juxtaposition of segments 21' and 22' to generator 20' in Figure 5. Field circuit segment 21" is shown in fragmentary form in Figure 10 to indicate that various uses may be made of the output of generator rotor 20". For example, by suitable configuration of segments 21" and 22" the kinemassic force may be led to a transfer ring such as transfer ring 25' of Figure 4.
In the present embodiment, generator drive motor 40" drives a spindle 60" through the intermediary of a belt 61", said spindle 60" being rotatable in suitable bearing assemblies 62" and 63". Mounted at the end of spindle 60" opposite belt 61" is a drive pulley 64" which is connected by a belt 65" to a driven pulley 66" secured to a drive shaft 67" adapted to rotate generator rotor 20". Drive shaft 67" is rotatably mounted in suitable bearing assemblies 68" and 69" supported in a generator drive chassis 70" together with bearing assemblies 62" and 63".
Typical specifications for generator rotor 20" may be that it be formed of aluminum alloy with 15.24 cm outside diameter and 20.32 cm axial length. Shaft 67" may be of steel with 19 mm outside diameter. Shaft 67" may be push-fit and secured to generator rotor 20" with an epoxy adhesive. Generator rotor 20" may be designed to rotate at 48,300 rpm. To achieve this angular velocity, drive motor 40" may be a one-sixth HP capacitor start, induction run type 115 VAC single phase 3450 rpm rated motor.
The spindle 60" may be provided with a pulley section 72" adapted to be rotationally engaged by belt 61". Pulley 74" driven by motor 40" and adapted to drive belt 61" may be a low-speed 8.89 cm diameter minimal crown type. Belt 61" may be of seamless polyflex material. The outside diameter of pulley section 72" may be 2.54 cm thus providing a 3.5 to 1 ratio between pulley section 72" and pulley 74". Thus, spindle 60" will be driven at 12,075 rpm.
Pulley 64" may be of intermediate-speed 10.2 cm diameter minimal crown type. Pulley 66" may be of high-speed 2.54 cm diameter type, thus providing a 4 to 1 ratio between pulley 66" and pulley 64".
The field circuit segments 21" and 22" may be formed of cast aluminum. The air gaps between segments 21" and 22" and generator 20" should advantageously be held to 0.005 mm., but are exaggerated for clarity. Chamfers 76" on each end of generator 20" should be 45° x 1.6 mm.
The driving pulley 64" may be secured to spindle 60" by cap lock nut 78". Bearing assemblies 62" and 63" may each be provided with eccentric rollers 80" adapted to be adjusted by pin sets 81" and 82" for belt tension control as shown in Figure 12. Pin sets 81" and 82", only one set being depicted in Figure 12, assure equal degrees of eccentricity adjustment of eccentric collars 80" thus maintaining a parallel orientation between the respective axes of spindle 60" and drive shaft 67" while adjusting their separation distance for the purpose of tension control of belt 65". After such adjustment, pin sets 81" and 82" are removed and the proper tensioning of belt 61" is caused by means of laterally moving the generator drive motor 40" with respect to generator drive chassis 70" by conventional means. Bearing assembly 63" is provided with bearing thrust cap 83". Bearing assembly 62" is provided with spring thrust cap 84" and thrust spring 85" which may be a disc-type spring.
Bearing assembly 68" may be provided with spring positioning cap 88" and thrust spring 89 which may be a disc-type spring. Bearing assembly 69" may be provided with bearing positioning cap 90" and bearing assemblies 63" and 69" may each be longitudinally adjusted with shims 91" and 92" which may be of ground plate and/or shim stock.
It has thus been demonstrated how the energy characterizing the half-integral spin nucleus can be utilized in a heat pump by altering the degrees of freedom of the crystal lattice structure. It is interesting to note that the assembly of atoms bound together by local inter-atomic forces to make up this crystal lattice structure is capable of vibration in a large number of independent normal modes about the static equilibrium configuration. In these vibrations is stored a large portion of the enthalpy of the solid, and hence the vibrations are believed to make the major contribution to the specific heat. The vibrational energy is quantized so there is recognized to be some zero-point motion even at 0° K.
While the inventive concept has been specifically demonstrated as applied to utilization in heat pumps, it will now be evident that the energy which characterizes the half-integral spin nucleus in fact provides a generally usable new tool for producing interactions among atomic structures and is in no way limited or restricted to such use in heat pumps or similar devices.