Faster,
lighter, & smoother, with higher efficiency, reduced
bending & gyroscopic stress...
http://en.wikipedia.org/wiki/Single-blade_propeller
Single-blade
propeller
A single-blade propeller may be used on aircraft to generate thrust. Normally propellers are multiblades but the simplicity of a single-blade propeller fits well on motorized gliders, because it permits the design of a smaller aperture of the glider fuselage for retraction of the power plant. The counterbalanced teetering mono-blade propeller generates fewer vibrations than conventional multiblade configurations[citation needed]. Everel Propeller Corporation in the 1940s produced the counterbalance single-blade propeller.[1]
http://notplanejane.com/everel.htm
Walter
Everel [ Everts ] // Everel Propeller Corporation





http://www.ladieslovetaildraggers.com/blog/no-way-a-one-bladed-propeller/
Everel
Propeller




PATENTS
US5971322
Propeller propulsion unit for aircrafts in general
Beretta, et al.
A propeller propulsion unit for aircrafts in general including a rotation shaft driven by a motor, the unit including a single-blade propeller and a counterweight that are connected to the shaft, the counterweight being arranged in a substantially diametrical position with respect to the single blade in order to balance the moment generated by centrifugal force and being variably offset with respect to the axis of the blade in order to balance the moment generated by the traction force of the single-blade propeller.
BACKGROUND OF THE INVENTION
The present invention relates to a propeller propulsion unit for aircrafts in general.
Aircrafts in general that do not use jet propulsion systems are conventionally provided with one or more propellers that convert the power supplied by the motor into traction.
The propellers normally used are of various kinds, such as for example pusher or pulling propellers, with fixed or variable pitch, and ducted; these propellers are furthermore constituted by two or more blades that are arranged so as to balance, on the propeller axis, both the action of the centrifugal force, produced by the rotation of said propeller, and the moments caused by the aerodynamic forces generated by the relative speed of the blade with respect to the air.
Propellers having a single blade are used exclusively in the field of flying model aircrafts, i.e., with power plants having extremely small power ratings.
The use of a single-blade propeller would certainly be useful in many applications in aircrafts, since it would be possible to improve the efficiency of the propeller and have considerable constructive simplicity; however, this type of use has so far been unfeasible, since all the problems that arise from compensating the radially-directed forces, inertial forces, and aerodynamic forces, with their corresponding moments, generated by the relative speed of the blade with respect to the air, have not been solved. These factors, which also vary as the relative speed of the blade with respect to the air varies, would produce troublesome stresses and vibrations that might lead to fatigue failure, especially if considerable masses are involved.
Accordingly, the use of a propulsion unit with single-blade propeller has never had a practical follow-up.
SUMMARY OF THE INVENTION
A principal aim of the invention is to solve the above problem by providing a propeller propulsion unit for aircrafts in general that allows to use a single-blade propeller without having imbalances of the forces involved that might produce vibrations or stresses.
Within the scope of this aim, a particular object of the invention is to provide a propulsion unit in which it is possible to automatically compensate for any imbalances in forces, working at all times with a system that is balanced and as such is never in abnormal operating conditions.
Another object of the present invention is to provide a propeller propulsion unit for aircrafts in general that is capable of giving the greatest assurances of reliability and safety in use thanks to its particular constructive characteristics.
Another object of the present invention is to provide a propeller propulsion unit for aircrafts in general that can be easily obtained starting from commonly commercially available elements and materials and is furthermore competitive from a merely economical point of view.
This aim, these objects, and others that will become apparent hereinafter are achieved by a propeller propulsion unit for aircrafts in general, according to the invention, comprising a rotation shaft driven by a motor, characterized in that it comprises a single blade that is connected to said shaft and a counterweight that is arranged in a diametrical position with respect to said blade in order to balance the moment generated by centrifugal force and is offset with respect to the axis of said blade in order to balance the moment generated by the traction force of the single-blade propeller.
BRIEF DESCRIPTION OF THE DRAWINGS
Further characteristics and advantages of the invention will become apparent from the following detailed description of some preferred but not exclusive embodiments of a propeller propulsion unit for aircrafts in general, illustrated only by way of non-limitative example in the accompanying drawings, wherein:
FIG. 1 is a schematic view of a propulsion unit with a single-blade propeller and an offset counterweight;
FIG. 2 is a view of a propulsion unit in which the blade, the hub, and the counterweight can oscillate with respect to the shaft;
FIG. 3 is a schematic view of a propulsion unit in which the blade is pivoted with respect to the hub;
FIG. 4 is a schematic view of a propulsion unit in which the hub is pivoted with respect to the shaft and the counterweight is fixed on the shaft;
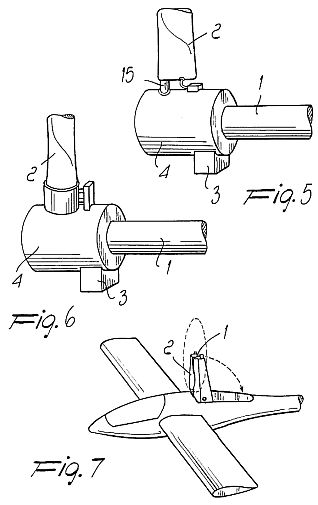
FIG. 5 is a schematic view of a propulsion unit in which the blade is rotatable about an axis that is substantially parallel to its own axis;
FIG. 6 is a view of a propulsion unit in which the blade is rotatable about its own axis;
FIG. 7 is a schematic view of the propulsion unit according to the invention, applied to a powered glider;
FIGS. 8 and 9 are schematic views of the offset of the counterweight with respect to the axis of the blade;
FIGS. 10 and 11 are schematic views of the possibility of varying the axial offset, in which the oscillations have been exaggerated to clarify the concept.


DESCRIPTION OF THE PREFERRED EMBODIMENTS
With reference to the above figures, the propeller propulsion unit for aircrafts in general, according to the invention, comprises a rotation shaft 1 driven by a motor that is not shown in the drawings.
The single blade 2 and a counterweight 3 are connected to the shaft 1.
In order to solve the problem of the imbalance caused by the moment generated by the traction force, the center of gravity of the counterweight is axially offset with respect to the center-of-gravity axis of the blade, so as to generate a new moment, produced indeed by the centrifugal forces, that is capable of balancing the previous moment.
In order to better clarify the concept, reference should be made to the diagrams of FIGS. 8 and 9, in which Fcp designates the centrifugal force on the blade, Fcc designates the centrifugal force on the counterweight, Ft designates the traction force, and Fr designates the resisting force of the blade.
As shown by the accompanying drawings, in order to compensate for the moment produced by the traction force Ft it is necessary to create a moment that balances it, and this is achieved by axially offsetting the counterweight 3, as shown in FIG. 8, along the axis of the shaft 1, whereas in order to compensate for the resisting force of the blade, as shown in FIG. 9, an axial offset is produced through an angular displacement of the counterweight 3 on the plane that it traces by rotating; in this manner, the counterweight is displaced, albeit slightly, from a position that is exactly diametrical with respect to the blade.
With reference to the drawings, FIG. 1 illustrates a solution with a counterweight 3 having a fixed axial offset, said solution being shown conceptually in the diagrams 8 and 9.
This solution allows to solve the problem of the imbalance of the forces involved in constant flying conditions.
However, even if operation occurs at a constant rotation rate, flying conditions are variable, and in particular the traction coefficient, and therefore the value of said traction force, can vary considerably.
This variability produces an imbalance, since the balancing moment generated by the axial offset is fixed and therefore does not take into account the change in the traction force.
In order to solve this problem, the proposed solution provides for a change in the axial offset, so as to balance the single-blade system.
As shown schematically in the diagrams of FIGS. 10 and 11, wherein d designates the axial offset, one result of the present invention is pointed out, namely the utilization, as the traction force Ft varies, of a change in the axial offset d, which is achieved by allowing the single-blade propeller to oscillate with respect to the shaft by means of a pivot that allows to form an angle .varies., even a small one. As shown schematically in FIG. 11, it is thus evident that as the traction force Ft varies, the axial offset d also varies and the resulting moment of equilibrium is changed accordingly.
In practice, therefore, a device is provided which interconnects the blade, the shaft, the hub, and the counterweight and is capable of creating, by utilizing centrifugal forces, another opposite moment that can vary as the traction coefficient varies.
In order to achieve and control the movement produced by the centrifugal forces, the distance, measured along the rotation axis, between the center of gravity of the blade and the center of gravity of the counterweight has therefore been changed, producing a change in the distance that is a function of the imbalance, in order to achieve the intended substantial balance.
As shown in FIG. 2, the distance is changed by means of a pivot 10 that allows the hub 4, the blade 2, and the counterweight 3, which are rigidly provided on the hub, to rotate about an axis that is perpendicular to the shaft 1.
From a conceptual design point of view, the involved centrifugal forces, which are extremely large, are discharged onto the hub 4, whereas the more modest torque transmitted from the shaft to the propeller is discharged onto the pivot 10.
A solution is thus proposed that is capable of meeting the requirements of adapting the axial offset without having excessive constructive complexities.
In the embodiment of FIG. 3, the hub 4 and the counterweight 3 are rigidly coupled to the shaft 1, whilst the blade 2 is pivoted to the hub 4, thus obtaining a conceptual diagram that is similar to the preceding one.
From a conceptual design point of view, the pivot 10 of the blade is subjected both to almost all the torque transmitted by the shaft to the propeller and, most of all, to the centrifugal force to which the blade is subjected.
The above-described solution therefore entails greater structural and construction problems, but it has the advantage that it is optionally possible to fold the blade 2 backward when it is not being used, so as to avoid creating resistance to motion.
An intermediate solution, which is conceptually linked to the preceding ones, is shown in FIG. 4; in this solution, the counterweight 3 is arranged on the shaft 1 and the hub 4 is rigidly coupled to the blade and pivoted with respect to the shaft 1.
According to a different embodiment, the axial offset can be achieved, as shown in FIGS. 5 and 6, by displacing the single blade 2 about an axis that is substantially parallel to the axis of the blade 2 and is substantially perpendicular to the shaft 1.
This variation in the axial offset value can be achieved, as shown in FIG. 5, by rotating the blade 2 about a secondary shaft 15 that is parallel to the axis of the blade 2, and therefore it is possible to vary both the axial offset and the pitch of the blade 2 and therefore the traction of the propulsion system is changed without altering the rotation rate of the motor, thus achieving a simultaneous adaptation of the pitch of the blade 2 and a change in the extent of the axial offset between the axis of the center of gravity of the blade 2 and the center of gravity of the counterweight 3.
This solution provides considerable advantages, such as a flying condition that theoretically always provides for the maximum efficiency of the propeller, and entails constructive difficulties that are considerable with respect to those described previously.
Another embodiment, shown in FIG. 6, changes the pitch of the blade 2 and therefore Fp instead of resorting to an axial offset.
In this case, therefore, the opposite moments are canceled out whilst keeping the value of traction constant at all times.
The blade 2 in practice is rotated about its own axis, providing a solution that is certainly simple but has the limitation of providing a traction value that is theoretically always constant.
From the above description it is thus evident that the invention achieves the intended aim and objects, and in particular the fact is stressed that a single-blade propulsion unit is provided which allows to compensate for the resulting imbalances in a very simple way, thus making this type of propulsion unit particularly adapted for application to powered gliders, in which it is necessary to retract the propulsion unit once the soaring altitude has been reached.
With conventional solutions, either a fixed two-blade propeller is used, with the need to provide a recess that is twice the one of the single-blade propeller, or foldable two-blade propellers are used, which are structurally complicated and not very effective.
The invention thus conceived is susceptible of numerous modifications and variations, all of which are within the scope of the inventive concept. All the details may furthermore be replaced with other technically equivalent elements.
In practice, the materials employed, so long as they are compatible with the specific use, as well as the contingent shapes and dimensions, may be any according to the requirements.
US6619585
Helicopter single-blade rotor
The present invention relates to a single-blade main rotor for helicopters designed so that the component of the blade lift normal to the rotational axis of the rotor is compensated by the inertial force obtained through the self-adjustment of the position of the rotor centre of mass relative to its rotation axis, it being provided that the position of the rotor centre of mass is determined by the coning angle of the blade.
particular, the EPO does not guarantee that they are complete, up-to-date or fit for specific purposes.
[0002] The present patent application for industrial invention relates to a single-blade rotor designed to be used as main rotor in helicopters and other types of rotorcraft. The rotor supports the helicopter during hovering and translated flight and, by means of its controls, allows execution of the manoeuvres typical of this type of vehicle.
[0003] To this end, helicopters are usually equipped with vertical axis rotors provided with two or more identical blades joined by hinges or similar means to a central propeller hub, which is in turn fixed to the upper end of a vertical mast driven by a system for the transmission of the rotary motion connected to one or more engines.
[0004] When maintained in rotation at the appropriate speed, the blades support the helicopter because of the upward lift produced as a consequence of the relative air speed with respect to the aerodynamically profiled blades. Moreover, the blades are subject to the weight force and, due to rotation, to the centrifugal force. The balance of all these forces and their moments with respect to the joints of the blades to the rotor hub and the mast, to which the weight of the rotorcraft is applied, determines the geometrical position of the blades, which, with respect to the plane orthogonal to the rotation axis, are directed upwards with a normally small coning angle. The entity of the total lift is adjusted by the pilot through the collective control lever that acts on the blade pitch by means of rods, levers, and rotating mechanisms connected with suitable pitch horns located on the hub of each blade, coupled in a rotary way to the rotor hub, with rotation axis sensibly parallel to its own longitudinal axis.
[0005] The control mechanisms allow the pilot to change the pitch of each blade with the cyclic control lever, with respect to the average value determined by the collective control, in order to create pitch differences symmetrical to this average value, in positions diametrically opposed to the rotational axis, inducing the rotor disk to tilt, thus causing the helicopter to move in the corresponding direction of tilting.
[0006] Rotors are usually manufactured according to multiple solutions, all of which, in order to guarantee correct operation, require the blades to be identical in terms of entity and mass distribution and as similar as possible in terms of shape and aerodynamic behaviour, while the joints at the rotor head and the kinematic chain that controls their pitch must have the same characteristics for all the blades of the rotor. Therefore, in order to maintain acceptable performance, such rotors require frequent maintenance works of blades tracking and balance, involving complicated procedures and methods and using special equipment.
[0007] In such multi-blade rotors, the lifting surface is divided between the blades of the rotor. With the same diameter and solidity, in a multiblade rotor each blade has a shorter mean chord which, for a given rotor tip, results in a lower value of the ratio between the product of the speed multiplied by the chord and the kinematic viscosity of the air (Reynolds Number). Since this lower value results in an increased blade drag coefficient for a given lift, it is therefore convenient to reduce the number of blades.
[0008] Moreover, it must be stressed that the rotation of each lifting blade produces a wake that can disturb the following blade, especially during hovering or low speed flight, with negative effects on its performance. The time interval between the passage of one blade in a disk area and the following as the number of rotor blades decreases, under given conditions, thus reducing the perturbation of the air in which the rotor operates.
[0009] In view of the above considerations, whenever possible, the adoption of a reduced number of blades can give aerodynamic advantages over similar rotors with a higher number of blades. Moreover, the reduction in the number of blades decreases the number of components and moving parts, leading to the simple bi-blade rotor with suspended hub connected to the mast with a horizontal hinge normal to the rotation axis.
[0010] Experiments have also been carried out with single-blade rotors in which the blade is balanced by a counterweight, but the difficulties in obtaining an acceptable balance between the forces and moments acting on such rotors under various operating conditions have not allowed the application and diffusion of such solutions.
[0011] The main purpose of the present invention is to overcome the inconveniences found in multi-blade and single-blade helicopters of known type, by means of a main rotor system for helicopters consisting of a single blade with central hub, a counterweight and balancing devices, having high flexibility and adaptability and characterised by easy construction, safe use and efficient operation.
[0012] The second purpose of the present invention is to create a single-blade rotor system, with working mechanism, in which the balance of the forces and moments acting on its parts is obtained by means of the reciprocal positions assumed by these parts as the coning angle of the single blade varies. The mechanisms controlling rotor balancing may be kinematic systems of known type, or other electromechanical or hydraulic devices. In any case, the horizontal component of the lift of the single blade is balanced by an identical opposed misbalance of centrifugal inertial forces, obtained by moving the rotor centre of mass relative to its rotation axis.
[0013] The third purpose of the present invention is to devise a rotor system, with control mechanisms, which does not require blades-tracking to ensure correct operation.
[0014] Last, but not least, another aim of the present invention is to design a mechanism capable of creating and maintaining a stable balance between the elements of the single-blade rotor during operation.
[0015] These and other aims, which will be highlighted in the description below, can all be achieved by the present invention.
[0016] Further characteristics and advantages of the invention will become more evident from the following description of three different embodiments, with reference to the enclosed drawings, which are intended for purposes of illustration and not in a limiting sense, whereby:
[0017] FIG. 1 is a schematic side view of the single-blade rotor and the devices used to maintain the balance, normal to the rotational axis of the rotor and the longitudinal axis of the blade according to a first embodiment;
[0018] FIG. 2 shows the same embodiment in an exploded axonometric view;
[0019] FIG. 2A is a view of the friction devices;
[0020] FIG. 3 and 4 are the same as FIG. 1, with the rotor blade inclined at a given coning angle;
[0021] FIG. 5 is a schematic side view of the single-blade rotor and the devices used to maintain the balance, normal to the rotational axis of the rotor and the longitudinal axis of the blade according to a second embodiment;
[0022] FIG. 6 is a schematic side view of the single-blade rotor and the devices used to maintain the balance, normal to the rotational axis of the rotor and the longitudinal axis of the blade according to a third embodiment.


[0023] The above figures show that the hub (1) of the rotor is joined to the support (14) of the blade (8) and made up of a vertical pair of plates (1a and 1b) symmetrical to the mast (7). The blade (8) is joined to the support (14) by a pitch hinge of known type, so that the blade can rotate around its longitudinal axis A-A, changing its geometrical pitch through joints and devices of known type, very similar to those generally used in helicopter rotors, applied to the pitch horn (9) of the blade, controlled by the rod (10).
[0024] The blade (8) is also fitted with a hinge, of virtual type also, with axis B-B in vertical and eccentric position with respect to the axis Y-Y of the mast which allows it to assume an angular position in the plane orthogonal to the rotational axis Y-Y, the said hinge being equipped with a damper or similar known devices.
[0025] The two plates (1a and 1b) making up the hub (1) contain two holes (1c) on the same axis R-R in which the cylindrical body (2) is coupled in a rotary way, the said body being centrally hollow and coupled in a rotary way also to the top of the mast (7) by means of a pair of opposing pins (7a), appropriately provided with friction devices 30, 31, with axis X-X normal to the same mast. The two opposite sides of the cylindrical body (2) also house two rotating coaxial cylinders (3) with axis T-T eccentric to the other axis R-R and X-X in a rotary way. The cylinders (3) are housed in an opposing coaxial pair of eccentric holes (2b) located in the aforementioned hollow body (2), which features another opposing coaxial pair of holes (2a), housing the pin (7a) mentioned above.
[0026] These cylinders (3) are in turn connected through revolving eccentric pins (4) to two pairs of identical levers (5) of the hub (11) of the counterweight, comprising the hub (11) placed at the end of an arm (12), featuring a profiled mass (13) at the other end.
[0027] The hub (11) is hinged in a rotary way to the rotor hub (1) by conaxic hinges (6) with appropriate friction devices, normal to the longitudinal axis of the counterweight; the joining of the centre of the pins (6) with the barycenter of the counterweight (13) determines a direction C-C. The hinges have threaded ends (6a).
[0028] More exactly, the hinges (6) are housed in two opposite coaxial holes located on the plates (1a and 1b) of the hub (1) along an axis W-W parallel to, but underlying, the axis X-X.
[0029] When the blade rotates without lift (FIG. 1), it rotates in almost the same horizontal plane as the counterweight , whose axis is formed by extending the axis A-A.
[0030] When the pilot increases the geometrical pitch of the rotating blade with the collective control, the lift inclines the blade upwards at a coning angle ([beta]) such that the lift balances with the other forces and moments acting on the blade (FIG. 3). When executing this movement the blade (8) drags the hub (1) to which it is joined, which rotates around the axis (R-R) of the cylindrical body (2) at a corresponding angle ([beta]).
[0031] The rotation also takes place with respect to the counterweight, which maintains its longitudinal axis orthogonal to the rotation axis Y'-Y' of the rotor. Thanks to this relative motion, the cylinders (3) linked by the revolving eccentric pins (4) to the levers (5) of the counterweight and the cylindrical body (2), coupled in a rotary way to the hub (1) rotate around each other, determining a new position of the hub (1) relative to the rotational axis Y-Y, along the direction C-C, passing through X-X that is, a different position of the rotor centre of mass with respect to the rotational axis. Since the lift is perpendicular to the blade, the coning of the blade involves a horizontal component of the lift, directed towards the centre of rotation. The horizontal force composes with the inertial forces affecting the blade and the counterweight. By appropriately dimensioning the relative positions of the pins (4), the hinges (6) and the axes R-R, X-X, T-T using known calculation methods of known type and considering the masses and positions of the relative barycentres of the blade, counterweight and the other components of the rotor and the mutual joints, it is possible, within the normal range of coning values to set up a sufficiently approximate and stable balance which remains constant on variating the coning angle and is practically independent of the rotational speed of the rotor, since the forces that act on the rotor-whether due to lift or inertia-all proportional to the square of the rotational speed.
[0032] The pitch variations, caused by the pilot acting on of the cyclic control from the pilot or determined by the asymmetry of the air flow investing the blade during horizontal flight, cause the rotational plane of the counterweight to tilt, with consequent tilting of the entire rotor around the axis X-X, as illustrated in FIG. 4, thus allowing the helicopter to be moved and controlled.
[0033] FIG. 5 illustrates a second embodiment-but not last-of the present invention in which the displacement of the rotor centre of mass relative to the rotational axis Y'-Y' and along the direction C-C, in order to balance the horizontal component of the lift, is carried out by an electromechanical actuator (15) acting between pins (16) and (17), respectively joined to the hub (1) of the rotor and the cylindrical body (2), which is in turn coupled in a rotary way with the hub, electrically controlled by a control box (18) according to the value detected and transmitted with electrical signals by the telescopic detection device (19) of known type of the relative distance assumed by the points (20) and (21), in relation to which the detector (19) is respectively hinged to the hub (11) of the counterweight and the hub (1) of the rotor, as the coning of the blade (8) changes.
[0034] In fact, the control box is designed and programmed using known calculation methods and construction systems, so that for each coning value of the blade, as measured by the detector device (19), the actuator (15) causes the cylindrical body (2) to rotate around the hub (1) so that the rotor centre of mass relative to the rotation axis, passing through X-X, assumes the correct position to ensure balance between the aerodynamic and inertial forces acting on the rotor.
[0035] FIG. 6 illustrates a third embodiment of the present invention, in which the actuator (15) controlled by the control box (18) radially displaces the mobile mass (22) that slides on the rod (12) of the counterweight, according to the coning angle measured by detector (19), thus changing the position of the rotor centre of mass relative to the rotational axis of the rotor.
[0036] The actuator (15) is joined by hinging pins (16 and 16a) to one of the plates of the hub (1) and to the mobile mass (22).
[0037] In this construction version the two plates of the hub (1) only show two opposing holes (23) located along the same axis X-X perpendicular to the rotational axis Y-Y of the rotor. The holes (23) house the pins (7a) located at the top of the mast (7).
US2742095
MECHANISM FOR BALANCING SINGLE BLADE AIRCRAFT ROTOR


Uniblade air rotor and flight and hovercraft vehicles
US 6234422
The invention is related to air flight vehicles, such as vertical take-off and landing (VTOL) airplanes, helicopters and covercraft.The goal of this invention is to create an air rotor designed so that while after vertical take off or cover regime, one can be stopped, fixed in a specific position and hidden into the fuselage (gondola) thus eliminating of air resistance when the rotor is not in working state. On landing this rotor can be extended out, brought into rotation and used for creation of lift force and vertical landing.The indicated goal is achieved by means of the rotor made as single blade (uniblade). The author solved the problem of force and moment balance of single blade. The center of gravity of the counterweight is located below the horizontal plane, and the blade has the horizontal sway axle, that crosses the vertical rotor rotation axis. The author offer this rotor on single axis, on co-axis, and on different exiles.This uniblade rotor is designed to subsonic and supersonic VTOL airplanes, for helicopter cars, flight motorcycles, hoppycopters, and hovercraft.The uniblades be used also as a veritable sweep wing (for subsonic and supersonic aircraft).
BACKGROUND OF THE INVENTION
1. Field of the Invention
This invention is related to air flight vehicles, such as apparatus of vertical take off and landing (VTOL), helicopters, covercraft, flighting automobiles, motorcycles, and traditional airplanes.
2. Description of the Related Art.
Known in art are helicopter rotors having 2, 3, 4, 6 and more blades (Jane's Aircraft Directory, 1995-1996), (FIG. 1a-d). Requirement of 2 or more blades is dictated by the blades aerodynamic force and weight balance. Total resultant lift force of blades thrust must act along blade axis O (FIG. 1) and blades' centrifugal force must be balanced, while the blade horizontal axis Oi is located close to vertical axis O, but Oi and O do not cross each other (FIG. 1e).
BRIEF SUMMARY OF THE INVENTION
The goal of this invention is to create an air rotor designed so that while in flight, it can be stopped, fixed in a specific position and hidden into the fuselage (gondola0 thus eliminating air drag when the rotor is not in working state.
On lending this rotor can be extended out, brought into rotation and used for creation of lift force and vertical landing.
The indicated goal is achieved by means of the rotor made as single blade (uniblade). The center of gravity of the counter weight B (FIG. 2) is located below the horizontal blade plane, and blade has the horizontal sway axis O1 that crosses the vertical rotor's rotation axis O (FIG. 2a).
Uniblade rotor has huge advantages when compared to a helicopter rotor with 2,3 of more blades. The uniblade rotor can be stopped (in direction of air stream) and moved in to the fuselage (gondola). In hidden position, the uniblade rotor does not interfere with the air flow whereby the air vehicle can reach designed speed, even supersonic speed. On landing, the uniblade rotor is easy to move out of the fuselage, bring into rotation and make landing in helicopter mode.
However, the uniblade rotor posses a problem of the blade balancing. The most important of which is that large unbalanced blade lifting force P rotates along circumference Q together with the blade at angular speed .omega. (FIG. 2b) and creates large capsizing moment, direction of which also changes (rotates).
In order to eliminate these negative effects, the inventor proposes to place the blade counterbalance B. The counter balance gravity center is shifted down (distance CB in FIG. 2a) from the blade plane, and for elimination of the capsizing moment, the axis of horizontal swing O of the blade is located so that it crosses rotation axis O of the engine power drive.
BRIEF DESCRIPTION OF THE SEVERAL VIEWS OF THE DRAWINGS
FIG. 1. Existing 2- and 6 blade rotors, blade swing axis O and balancing scheme of lifting force P=.SIGMA.Pi.
FIG. 2. Uniblade rotor and arising problems of unbalanced lifting and centrifugal forces. P is blade's lifting force. Q is circular trajectory along which lifting force P moves. B is counterbalance. F1, F2 are centrifugal forces of the blade and counterbalance correspondingly. CB is shift distance of the counterbalance center of gravity down from the blade plane. O1 is rotor axis. O is blade swing axle.
FIG. 3. Diagram of balancing of the blade lifting force P, capsizing moment M and centrifugal force F1. The balance is attained due to shifting the counterbalance down and placing swing axle O at the rotor rotation axle,
FIG. 4a. Co-axle uniblade rotor. KL is meeting line of synchronously rotating blades. Line KL is positioned in the direction of flight. Angular speeds of the blades are equal to each other., i.e. .omega.1 =.omega.2. Such meeting line KL provides small distance between the uniblades.
FIG. 4b. Uniblade rotor with turning blade at the end of main blade. That may be used for covercraft--helicopter which used ground effect. 1 --main uniblade, 2 --turning blade at end of the main blade, 3 --counterbalance, 4 --hinge of the blade swing axle, 5 --axis of the turning blade, 6 --sensor of distance from blade to barrier (for example, ultrasonic sensor), 7 --ground, 8 --direction of turn of additional blade, 9 --trajectory of the end of additional blade, 10 --trajectory of main blade, 11 --hinge.
FIG. 5. Sketch of the synchronously rotating uniblades rotors rotated in opposed directions, which have different axis. Meeting line KL is located in perpendicular direction of flight. The such uniblade rotors provide small distance between the rotors.
FIG. 6 Supersonic helicopter--airplane (supersonic VTOL Fighter) with uniblade retracted rotor. a) 1--single-blade propeller; 2--sliding stand; 3--jet streams from jet engines, equalizing the reaction of the propeller; 4--superstructure for retracting the propeller; 5--hatches.
b) Supersonic helicopter--airplane with retracted single blade propeller.
FIG. 7. a) Subsonic transport/passenger VTOL airplane with uniblade rotor.
b) Airplane with retracted rotor.
d) Airplane with retracted uniblade.
FIG. 8. Small subsonic passenger VTOL airplane with uniblade rotor.
FIG. 9. Flight car with co-axes uniblade rotors.
FIG. 10. Motorcycle with co-axle uniblade rotors.
FIG. 11. Hoppycopter (knapsack helicopter) for young people, sportsmen, and soldiers with small co-axis uniblade rotors.
FIG. 12. a) Supersonic VTOL airplane with two co-axis uniblade rotors using in horizontal flight as variable swept wings. B--counter balance weight.
b) Airplane in flight.
FIG. 13. a) Supersonic airplane with uniblade rotor using also as variable swept wing.
b) Airplane in flight.
FIG. 14. The covercraft--helicopter with co-axile uniblade rotor which has the turning blade at the end of the main blade.
FIG. 15. Mechanism of folding for uniblade.
a) 1--uniblade, 2--hinge, 3--lock, 4--hinge of blade swing exile, 5--main exile, 6--counterbalance.
b) Uniblade in folding (variant 1).
c) Uniblade in folding (variant 2).






DETAILED DESCRIPTION OF THE INVENTION
As shown in FIG. 2, uniblade rotor comprises blade 1, counterbalance B, horizontal axle of blade swing O situated in the blade plane and crossing vertical drive axle O. Counterbalance B is shifted down at distance CB from the blade plane. This distance CB could go to zero in limit in presence of axle O.
The uniblade rotor work as follows. Lift force P (FIG. 2) created by a rotating blade, causes moment M (FIG. 3) that tends to rotate the blade counter-clockwise. Counterbalance centrifugal force F (FIG. 2a), due to the counterbalance shifted down, also creates counterweight moment M (FIG. 3) with direction opposite to moment M (FIG. 3).
Resultant lift force P acts along drive rotation axle ) and balances flight vehicle weight G (FIG. 3). The blade and counterbalance centrifugal forces F1 and F2 are also balanced, F1 =F2.
Co-axial uniblade rotors rotate synchronously and meet on line KL of movement direction of the flight vehicle (FIG. 4). In this position the blades are parallel to each other which makes it possible to keep distance between the blades (unirotors) small, actually much smaller than in traditional co-axial multiblade helicopter propellers. This results in uniblade having significantly simpler design and increased rotor efficiency.
The main blade can has the additional small blade at the end (FIG. 4b). That may be turning or interning. This end blade increase the rotor efficiency and trust about ground. The trust and ratio of fuel depend strong from distance, which is from the end of additional blade to ground. The trust may increase in 2-6 times. It is important for covercraft-helicopter (FIG. 14). In regime of cover this vehicle can move over marsh, river, sand. And in regime of helicopter one can flight over forest, precipice, mountains and so on.
The end blade has a sensor of distance from end of additional blade to ground, for example, ultrasonic sensor. The additional blade can rotate and follow to profile of ground surface (see FIG. 4b).
The uniblade can be make of folding (FIG. 15). That can have hinge 2 and lock 3. The folding may used on flying car, motorcycle, holycopter, covercraft and military VTOL airplanes and helicopters.
As you see on FIG. 15c the size of aircraft may be decreased more than two times, and request area for storage in 4 times.
In case of a coupled rotor, thanks to only one blade in the uniblade rotor, distance between axles of the two uniblade rotors can be made smaller than in multiblade variant. In this case the meeting line KL (of the synchronously rotating rotors) is perpendicular to flight direction (FIG. 5).
Various versions of the uniblade use are shown in FIGS. 6 to 13. FIG. 6 shows a supersonic fighter aircraft with the uniblade rotor. The rotors reaction here is balance by the gas jet of the aircraft. FIG. 7 shows the subsonic transport VTOL airplane having the uniblade rotor reaction of which is balanced by the single-blade tail propeller. FIG. 8 shows the small subsonic passenger VTOL airplane with uniblade rotor. FIG. 9 shows the flight car with co-axial uniblade rotors. One can be used as helicopter and as a car. FIG. 10 shows the flight motorcycle for young people. One can be used as a helicopter and as a motorcycle. FIG. 11 shows the small knapsack helicopter (hoppycopter) for young people, sportsmen, and soldiers with uniblades co-axial rotors. It can be put on shoulders of man and allow people to flay with maximum speed 50 mph (80 km/h), in ceiling of 12000 foot (4000 m), and range of 100 miles (160 km). FIG. 12 shows high speed vertical takeoff and landing airplane having co-axial rotors blades of which serve as variable geometry wings.
The blade of the uniblade rotor may have such a form of the widen part where the counterbalance is placed, that the resultant of lift force pressure and resistance is located at the vertical connecting axle. Thanks to this blade in the stopped position can work in flight as a high-speed variable swept wing (FIG. 13).
The uniblade rotor can have a mechanism for breaking, stopping, moving into the fuselage and moving out of the fuselage and rotating--all can be done in flight. Moreover, a mechanism for the rotor move-out operations can be made as either movable axle or as sliding axle of varying length. In removed state, the rotor does not create any drag and speed of the air vehicle can reach its designed value, including supersonic level. On landing, the rotor is moved out of the fuselage and starts rotating. It must be noted that this is possible only with a single-blade (uniblade) rotor. For rotors with 2, 3 or more blades, it is practically impossible to design in-flight rotor stopping and removal mechanism. The air stream would immediately destroy rotor, or topples a flight vehicle. Moreover, it is very difficult from a technical point of view, to move in and move out several blades.
Even with out hiding an uniblade rotor in flight, the single blade is positioned along the air stream and creates a little drag. Dimensional sizes of an flight vehicle with the uniblade rotor is less than sizes of a helicopter, and the apparatus can be quickly prepared for flight.
Result of the Patent Investigation
Patent are close to topics "Uniblade Air Rotor for Flight Vehicles"
Inventor: Alexander Bolonkin
USA
U.S. Pat. No. 5,074,753 Rotor blade
U.S. Pat. No. 4,434,956 Flexible helicopter rotor
U.S. Pat. No. 4,129,403 Helicopter rotors
U.S. Pat. No. 3,902,821 Helicopter rotors
U.S. Pat. No. 4,099,812 Helicopter rotors
U.S. Pat. No. 5,199,851 Helicopter rotor blades
U.S. Pat. No. 4,316,700 Helicopter rotor blades
U.S. Pat. No. 4,427,344 Helicopter rotor blade
U.S. Pat. No. 4,652,211
U.S. Pat. No. 4,588,356
U.S. Pat. No. 4,549,851
U.S. Pat. No. 4,540,340
U.S. Pat. No. 4,512,717
U.S. Pat. No. 5,320,494
U.S. Pat. No. 4,549,850
U.S. Pat. No. 4,543,040
U.S. Pat. No. 4,516,909
U.S. Pat. No. 4,509,898
U.S. Pat. No. 5,246,344
U.S. Pat. No. 5,205,851
U.S. Pat. No. 5,195,851
U.S. Pat. No. 5,174,721
U.S. Pat. No. 4,975,022
U.S. Pat. No. 4,808,075
U.S. Pat. No. 4,714,409
U.S. Pat. No. 4,668,169
U.S. Pat. No. 4,551,067
Everel
Propeller Corporation
Hélice.
CH274420
Hélice.
CH266545
Hélice.
CH257278
Hélice.
CH255869
Einflugelschraube
CH202709

The invention relates to a single leaf screw disposed on a drive shaft with an extension shaft, the vane disposed counterweight that is disposed perpendicular to the drive shaft, so that the blade screw about its own in extending the service of the underpinning axis located. Said Influence of centrifugal force and also under the influence of air resistance can be pivoted.
The drawings. an exemplary embodiment of the subject invention: Figure 1 shows a schematic view of such a thumbscrew, Figure 2 is an elevational view of the screw; FIG, 3 is a vertical cross-section of middle, 3 = 3, Figure 4 is a horizontal sectional view 4 - .4, Figure 5, 6 and 7 are views. of different end positions of the wing screws, and indeed is the wing with respect to the axis about which it rotates in different angles, shown with Figure 5, the smallest Indicating the slope wing, so that when the air pressure is high, which corresponds to the air pressure at, sea level. Figure 6 represents an average slope, and 7 so twisted the wing that he has the highest possible pitch....
Screw drive with a speed considerably above that speed the level at which the efficiency level of a normal, screw with two or three blades is achieved. That is therefore beneficial because the engines nods its highest efficiency at that speed reach speed that is best just for the wing screw.